Case 15: Volume Reminder
Contents
19. Case 15: Volume Reminder#
19.1. Introduction#
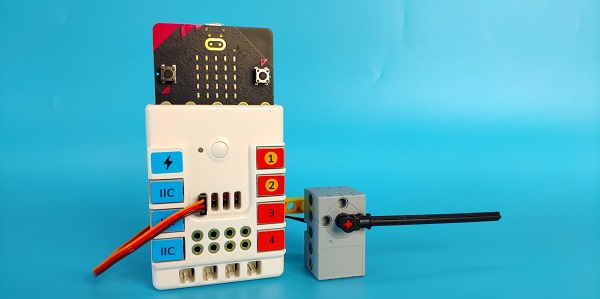
This device uses the sound intensity detection on the micro:bit V2 to control the servo to rotate to the corresponding position by detecting the surrounding sound level, so that the pointer connected to the servo fluctuates with the volume.
19.2. Quick to Start#
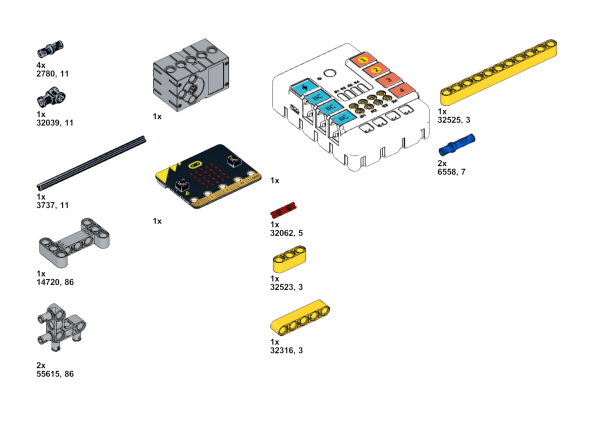
Materials#
Nezha expansion board × 1
micro:bit × 1
servo × 1
RJ11 wires × 1
Bricks × n Tips: You may need to purchase Nezha Inventor’s Kit if you want all the above compoents.
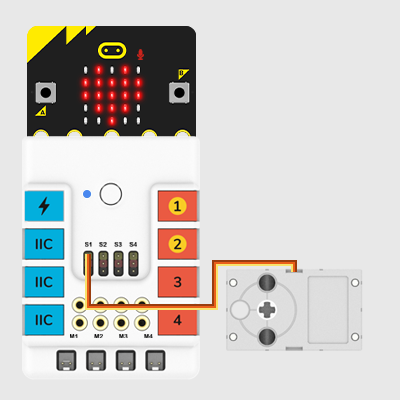
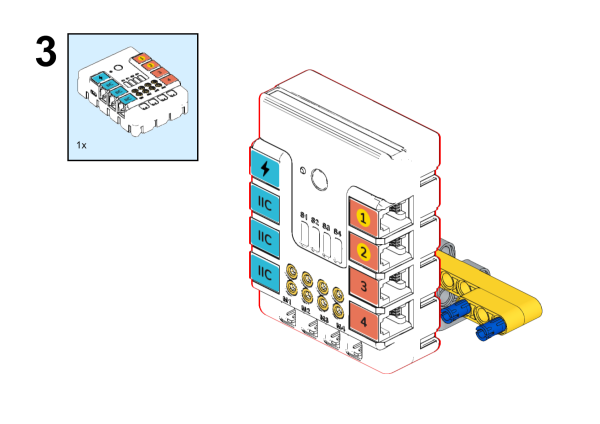
Connection Diagram#
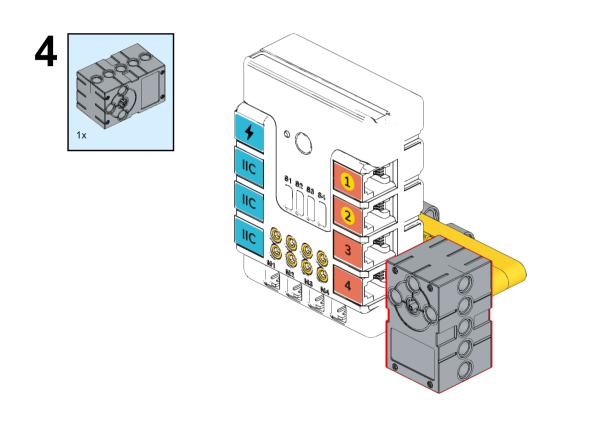
Connect the 360 degrees servo to S1 port on the Nezha expansion board.
Assembly Video#
Video link:https://youtu.be/sq4fq4W51Ck
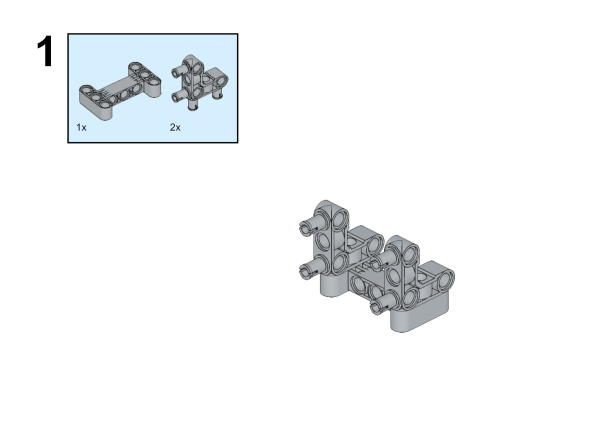
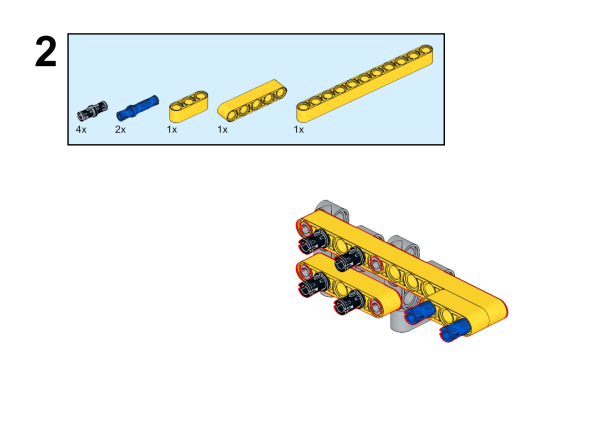
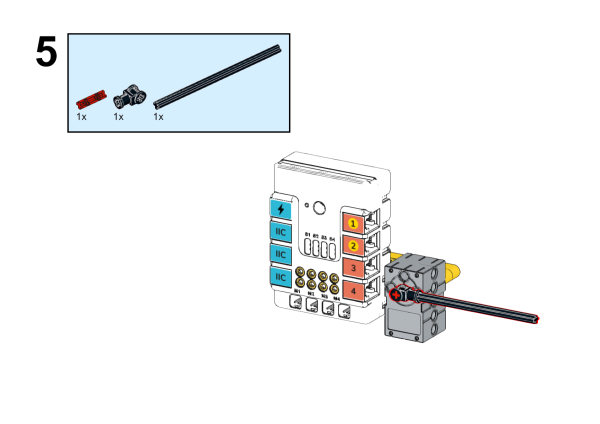
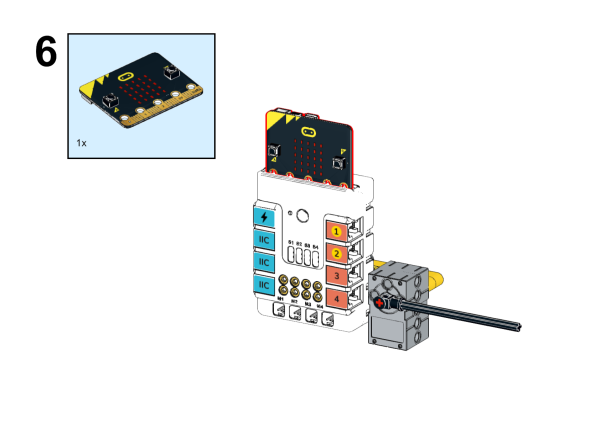
Assembly Steps#
19.3. MakeCode Programming#
Step 1#
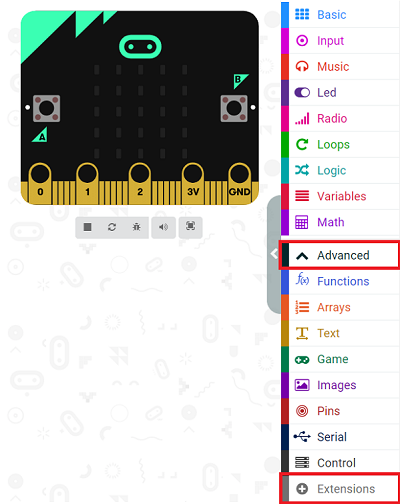
Click “Advanced” in the MakeCode drawer to see more choices.
We need to add a package for programming. Click “Extensions” in the bottom of the drawer and search with “PlanetX” to download it.
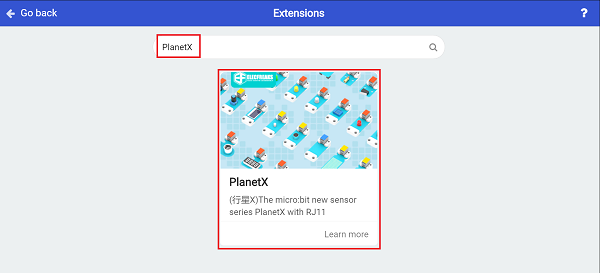
We need to add a package for programming. Click “Extensions” in the bottom of the drawer and search with “Nezha” to download it.
Note: If you met a tip indicating the codebase might be deleted due to incompatibility, you may continue as the tips say or create a new project in the menu.
Step 2#
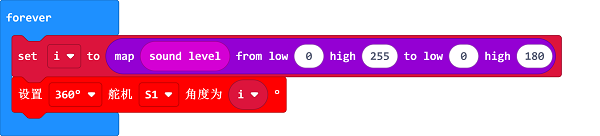
Programme as the pictures indicate#
Link#
Link: https://makecode.microbit.org/_JfDgxzJkc72X
You may download it directly below:
Result#
The servos drive in accordance with the change of the volume.