


Purpose
The rainbow LED changes in accordance with the color of the cards and it executes the defined functions accordingly(move forward;change the color of the headlights at random; obstacles avoidance; line-following)
TPBot x 1
Hardware Connections
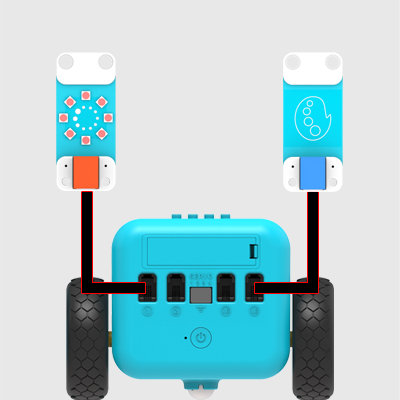
Connect rainbow led to port 1 and color sensor to IIC port on TPBot.
Software
Programming
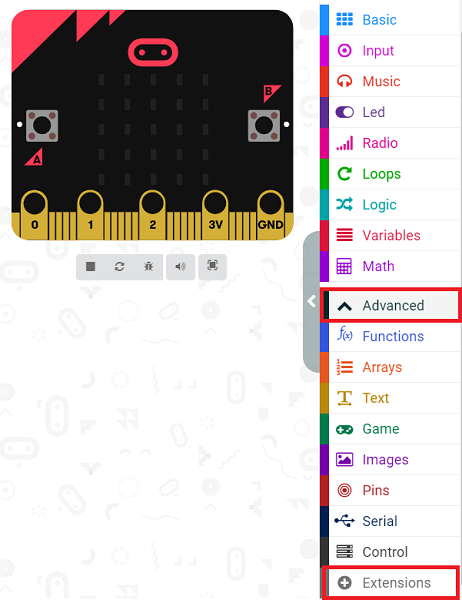
Click “Advanced” to see more choices in the MakeCode drawer.
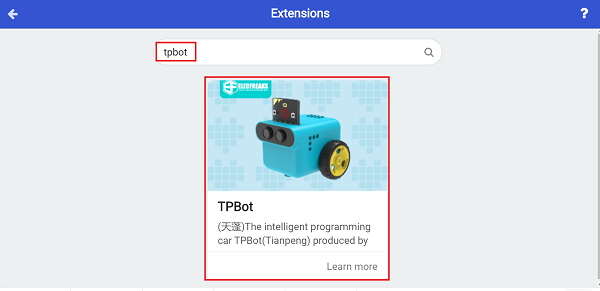
We need to add a package for programming. Click “Extensions” in the bottom of the drawer and search with “tpbot” in the dialogue box to download it.
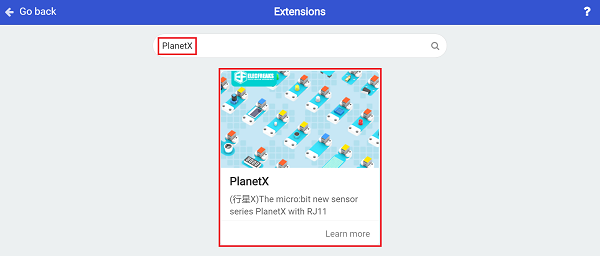
We need to add a package for programming. Click “Extensions” in the bottom of the drawer and search with “PlanetX” in the dialogue box to download it.
Sample
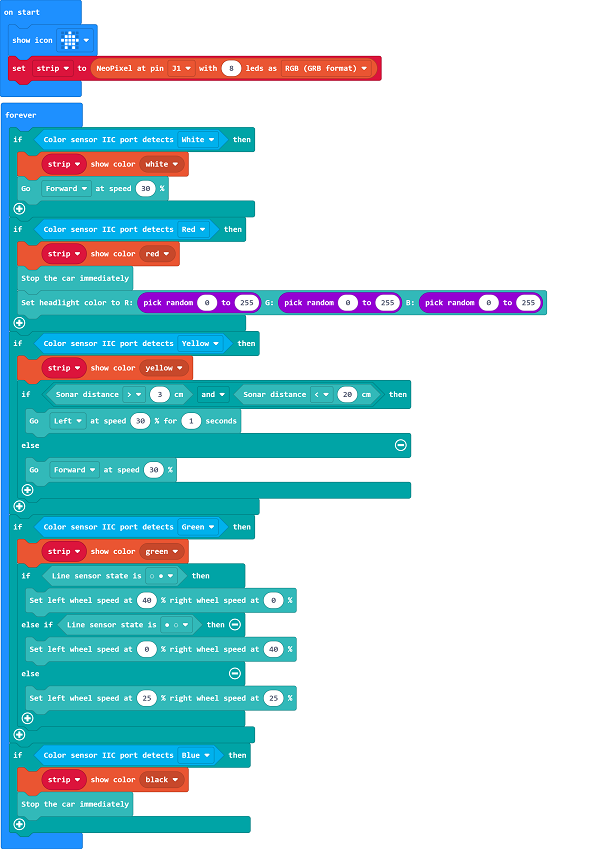
In on start brick, drag the show icon brick into it and initialize the led strip and has it connected to J1 port.

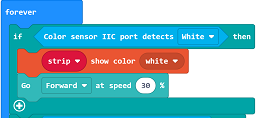
In forever brick, set the rainbow led in white if the color sensor detects white, and set TPBot move forward at the speed of 30%.
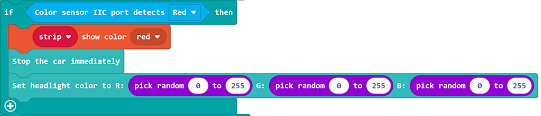
Set the rainbow led in red if the color sensor detects red, set TPBot stop moving and the RGB value of the headlight a random number among 0~225.
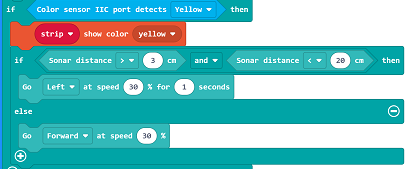
Set the rainbow led in yellow if the color sensor detects yellow, and judge if the returned value from the sonar:bit is between 3~20. If yes, set TPBot turn left for 1s at the speed of 30% or move forward at the speed of 30%.
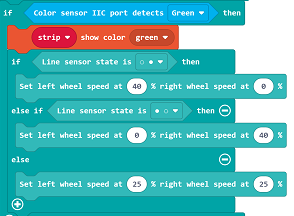
Set the rainbow led in green if the color sensor detects green, and judge the status of the two-way line-tracking sensor. If black is detected on the left, set the speed of the left wheel as 0 and right as 40; if it is detected on the right, set the speed of the left wheel as 40 and right as 0; if it is detected on both sides, it means the TPBot does not deviate from the black line, and set it move foreward at the speed of 25%.
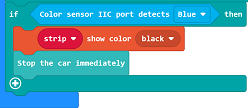
Set the rainbow led in blue if the color sensor detectsblue, set the TPBot stop moving.
Coding
Link:https://makecode.microbit.org/_YrH0rDiLJEKgYou may also download it directly below:
Conclusion
Place the cards in different color in the front of the gesture sensor to activate different functions:
White card: Rainbow LED lights on in white and TPBot moves forward.
Red card: Rainbow LED lights on in red and TPBot stops moving with the headlights changing the colors at random.
Yellow card: Rainbow LED lights on in yellow and TPBot goes into the obstacle-avoidance mode.
Green card: Rainbow LED lights on in green and TPBot goes into the line-tracking mode.
Blue card: Rainbow LED lights on in blue and TPBot stops moving.
FAQ
Q: While operating this case, why the car might not work properly?
A: It might be the low power of the batteries, please try adding the value of TPBot’s speed and test again.


