

The four-way survey sensor is a new sensor in the Planetary family. It has four survey probes and has survey capability on more complex maps. The operating voltage is between 5-3V.
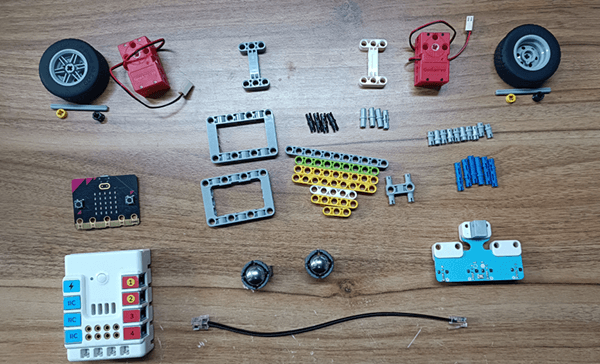
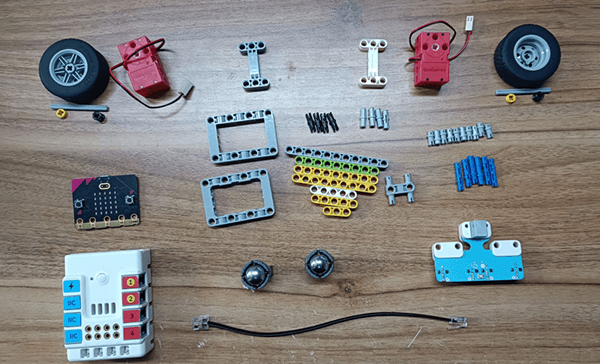
material requested:
2、Structure of the building:
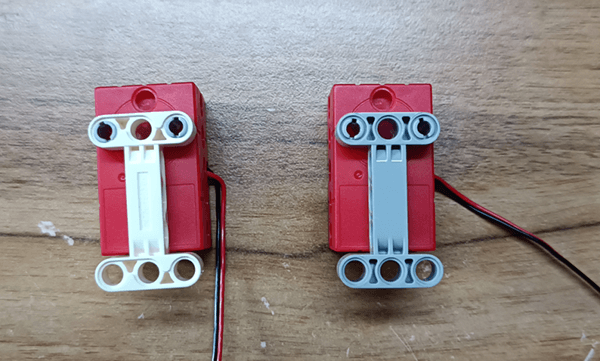
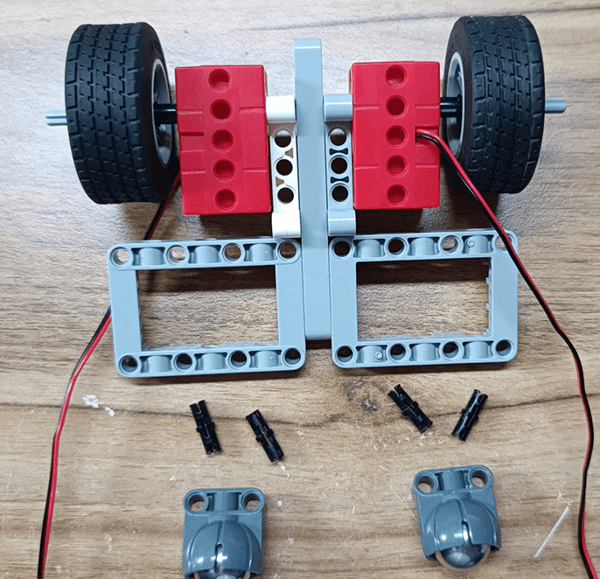
2.1、Set up the fixed structure of the motor
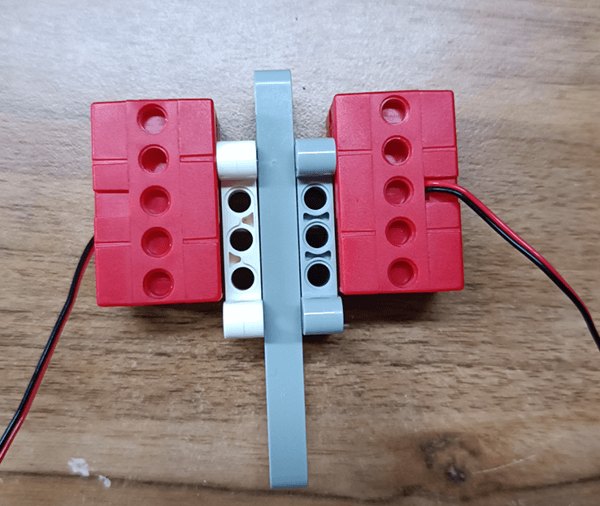
2.2、Join the two motors together

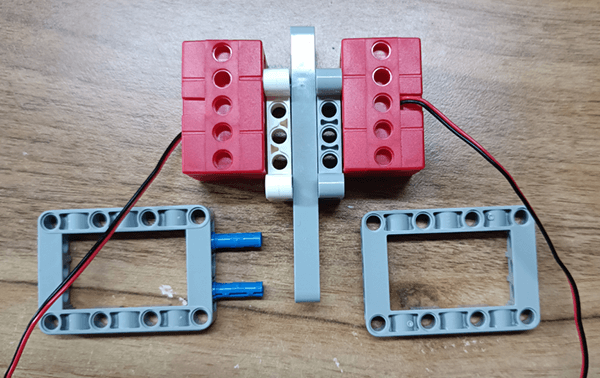
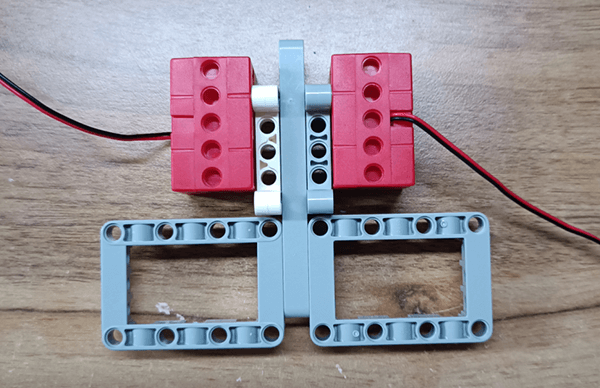
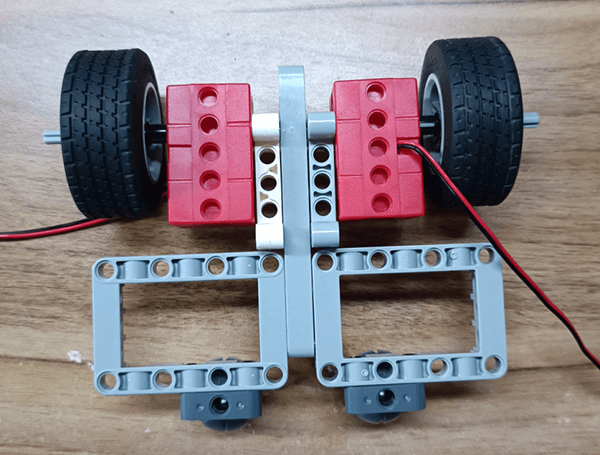
2.3、Splice the frame part
2.4、Spliced rear wheel
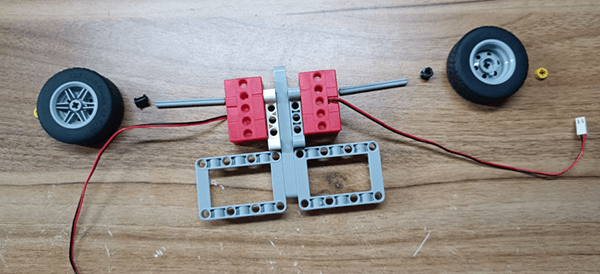
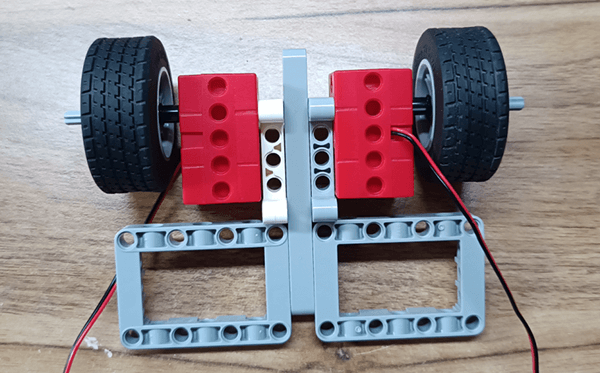
2.5、Spliced front wheel
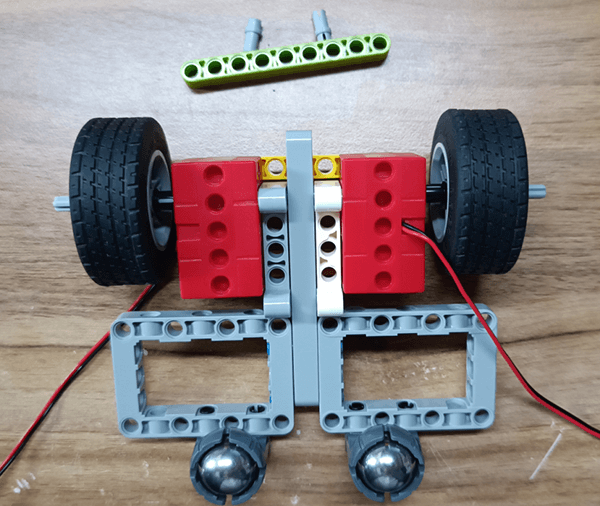
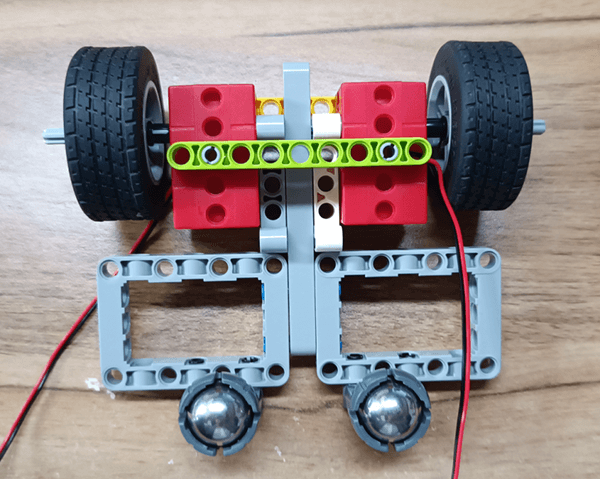
2.6、The upper part of the motor is reinforced
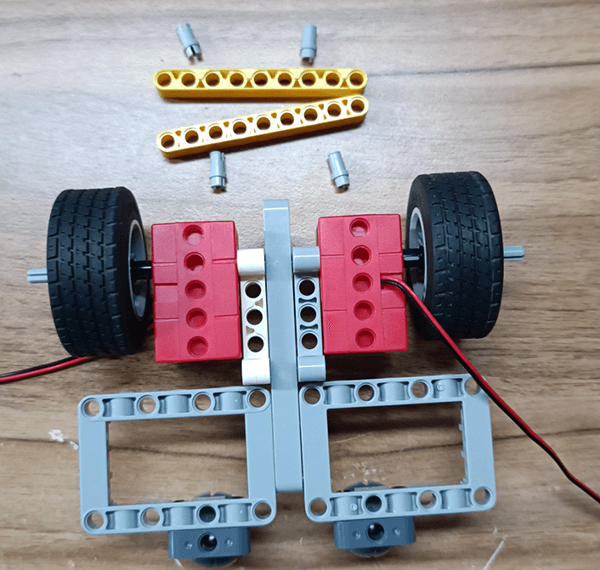
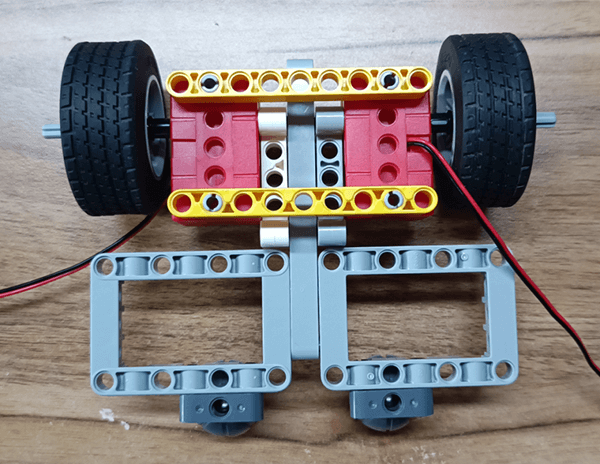
2.7、Reinforce the lower part of the motor
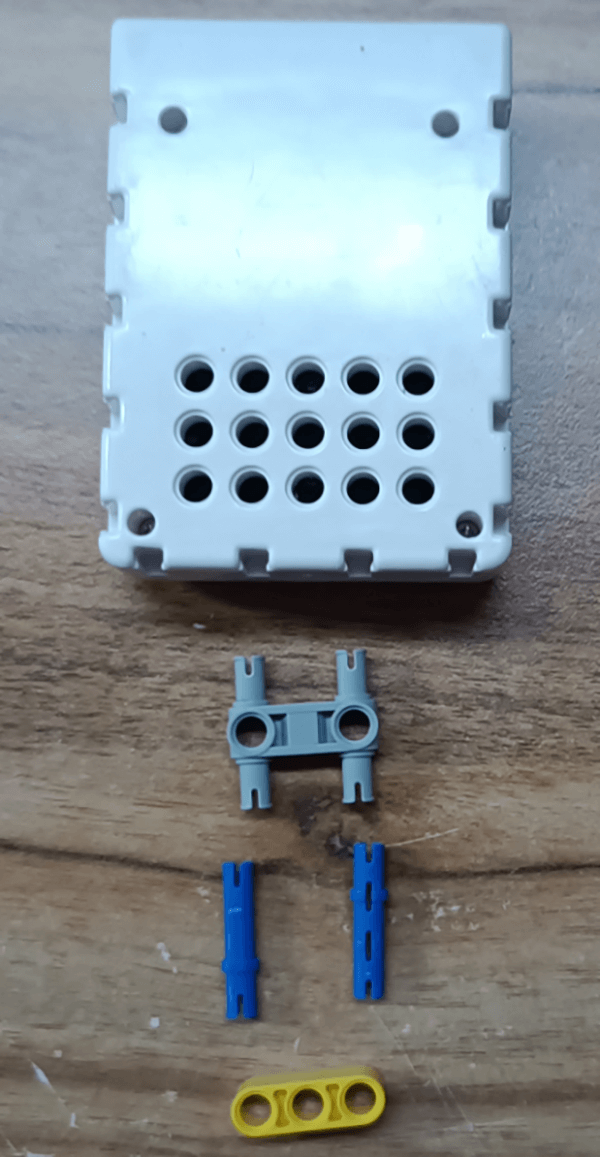
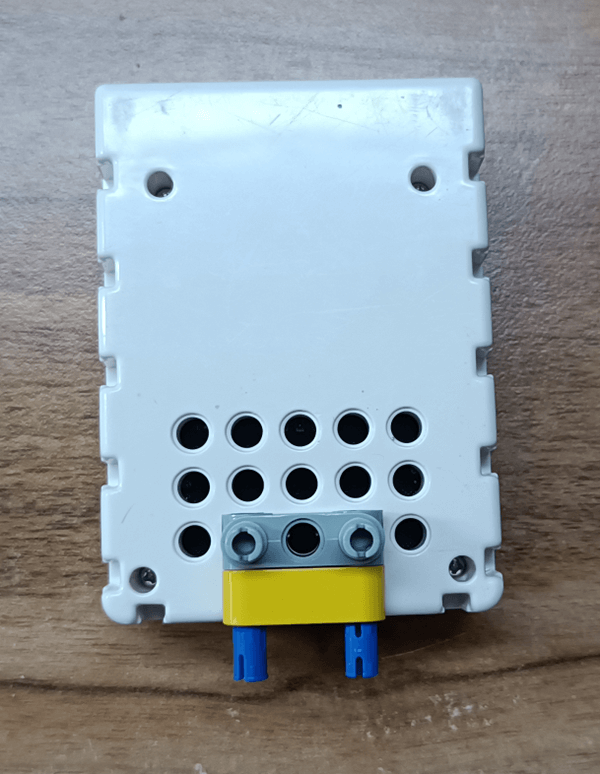
2.8、Nezha fixed structure
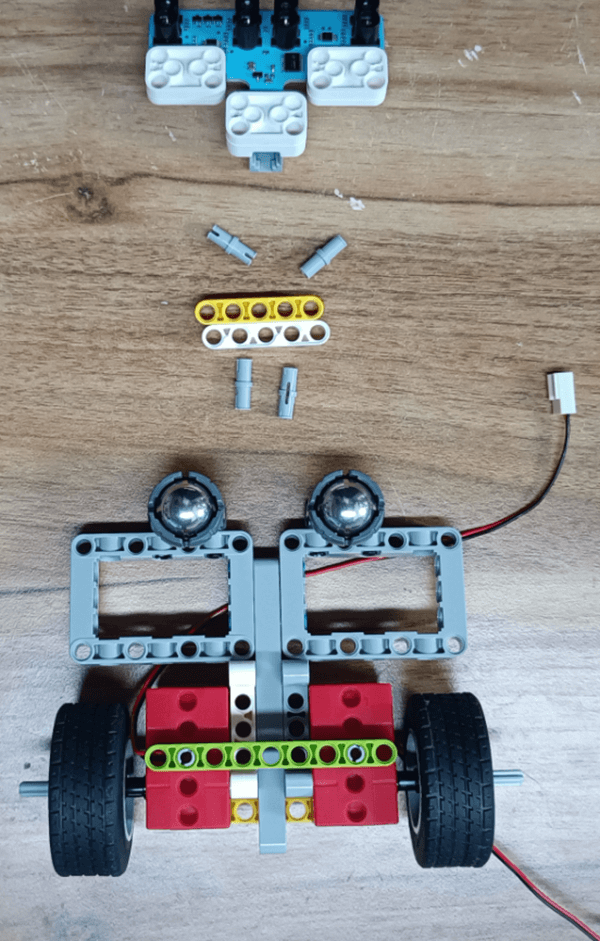
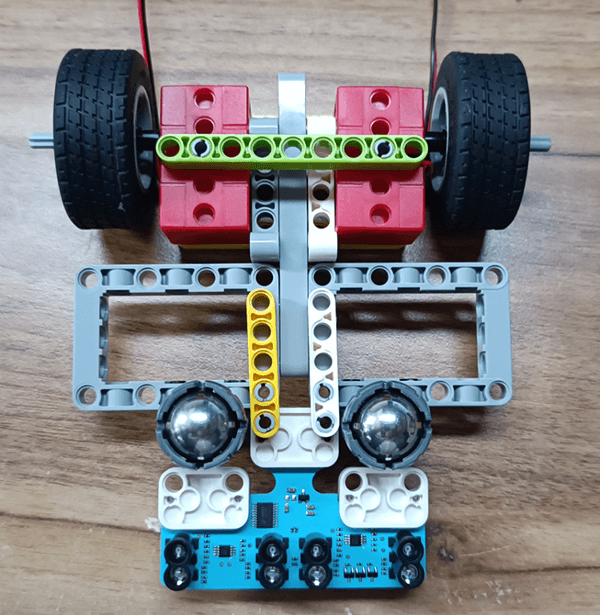
2.9、Assemble a four-way patrol line
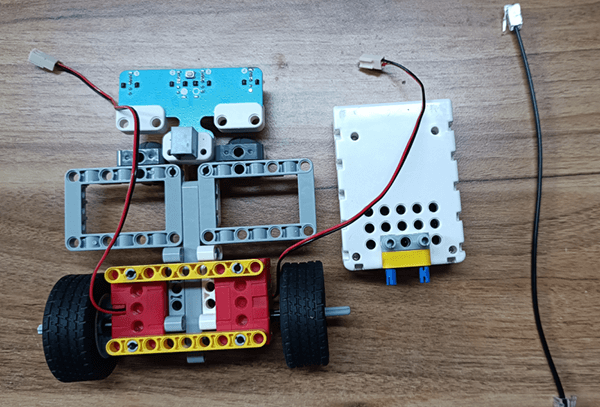
2.10、assemble NeZha
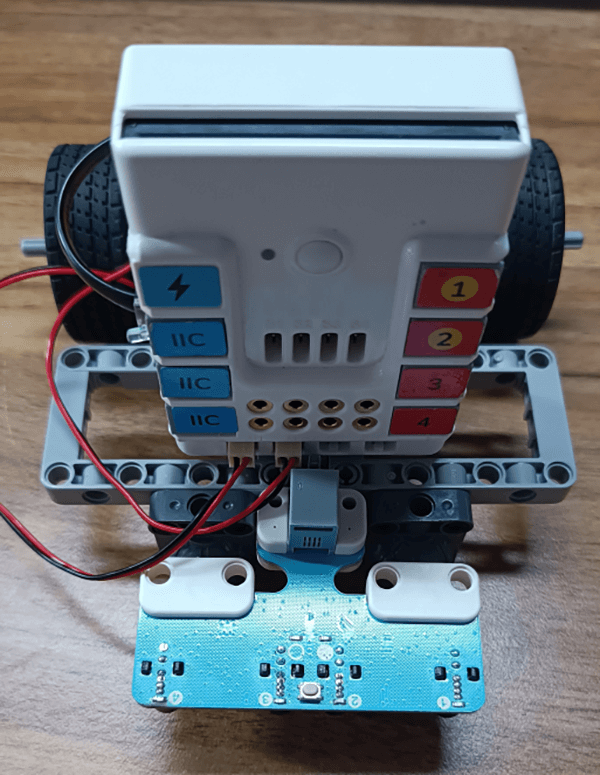
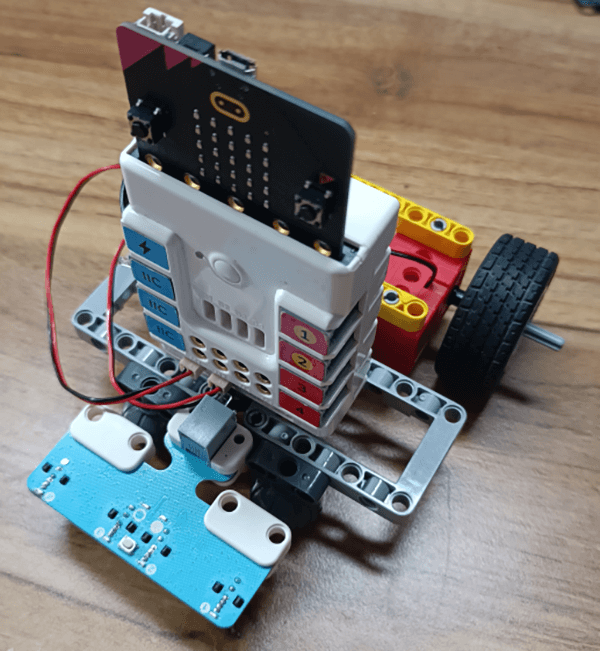
Connect micro-bit final product
3、code
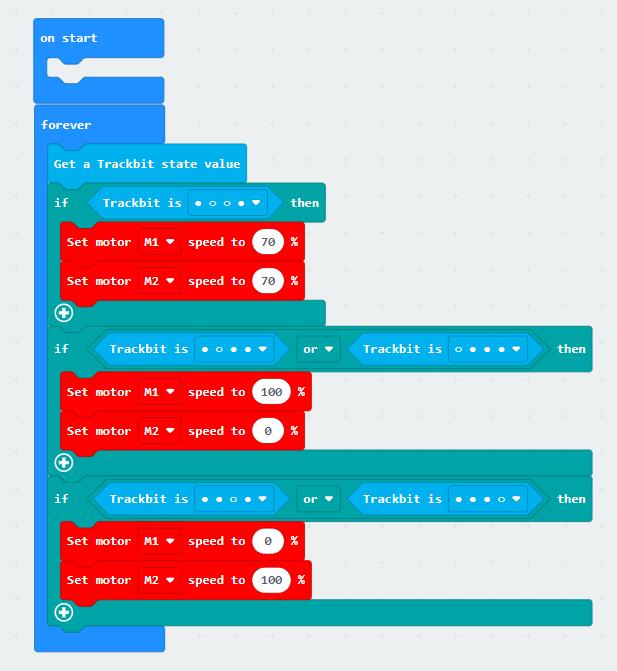
basic.forever(function () {
PlanetX_Basic.Trackbit_get_state_value()
if (PlanetX_Basic.TrackbitState(PlanetX_Basic.TrackbitStateType.Tracking_State_4)) {
neZha.setMotorSpeed(neZha.MotorList.M1, 70)
neZha.setMotorSpeed(neZha.MotorList.M2, 70)
}
if (PlanetX_Basic.TrackbitState(PlanetX_Basic.TrackbitStateType.Tracking_State_6)
|| PlanetX_Basic.TrackbitState(PlanetX_Basic.TrackbitStateType.Tracking_State_13)) {
neZha.setMotorSpeed(neZha.MotorList.M1, 100)
neZha.setMotorSpeed(neZha.MotorList.M2, 0)
}
if (PlanetX_Basic.TrackbitState(PlanetX_Basic.TrackbitStateType.Tracking_State_7)
|| PlanetX_Basic.TrackbitState(PlanetX_Basic.TrackbitStateType.Tracking_State_9)) {
neZha.setMotorSpeed(neZha.MotorList.M1, 0)
neZha.setMotorSpeed(neZha.MotorList.M2, 100)
}
})
4、demonstration


