

UTFT Supported TFT01-1.8SP/2.2SP/2.2/2.8
January 11, 2019
5110 and TFT LCD video tutorial
January 11, 2019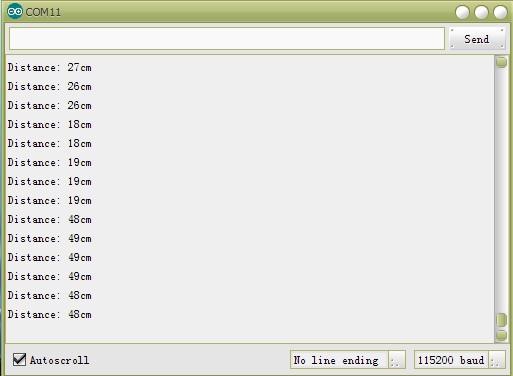
With the ultrasonic advance, especially as high-power semiconductor device technology matures, the application of ultrasonic has become increasingly widespread, no matter in the field of robotic detection, parking security, or the object distance measurement, therefore, besides the previous HC-SR04 Ultrasonic Module User Guide, in order to facilitate customers, for the SDM-IO No Blind Area Ultrasonic Module , we also made user guide, hoping these enriched materials are capable to be beneficial to every electronics hobbyists.
Operating Principle???
1. Using IO trigger to measure distance, giving TRIG at least 10us signal.
2. The module automatically sends eight 40KHZ square wave, and automatically detects whether a signal returns.
3. If the signal returns, ECHO would outputs a 0 signal after test. The duration from TRIG = 1 to ECHO = 0 is the time of ultrasonic wave from the transmitter to return.
4. When TRIG from 0 -> 1, the MPU starts 18ms timer to control this measurement timeout. When more than 18ms, ECHO still does not appear 250us 0 signal, which means that there are no obstructions.

Main features:
1. Ultra-miniature, only the equivalent of two transmitter and receiver head of the area, unable to be smaller.
2. No blind spots (within 15mm a triangle measurement results will be between 8-20mm).
3. Fast response, and 18ms measurement period enable it not easy to lose high-speed targets.
4. Reflective head is close to receiving head, and they form basically linear relationship with the measured objectives.
5. The module has LED indicators to facilitate the observation and testing.
Application Areas:
- Robotics barrier
- Object distance measurement
- Level detection
- Public security
- Parking detection

- Open Arduino IDE 1.0.X, and choose the corresponding board and serial port.
- Click file/ examples/ NoBlind_ultrasonic until the code pop up.
- Compiling sketch until Done uploading appears, which represents the uploading has been successful.
- Open serial monitor and set the corresponding BaudRate.
- If you see similar information in serial monitor as below, you succeeded.
