Case 07: Remote Control
Contents
10. Case 07: Remote Control#
10.1. Purpose#
Build a Wonder Rugged Kit that can be controlled by Joystick:bit.
10.2. Products Link#
10.3. Background Knowledge#
10.4. Software#
10.5. Program#
Step 1#
Click “Advanced” in the drawer of MakeCode to see more choices.
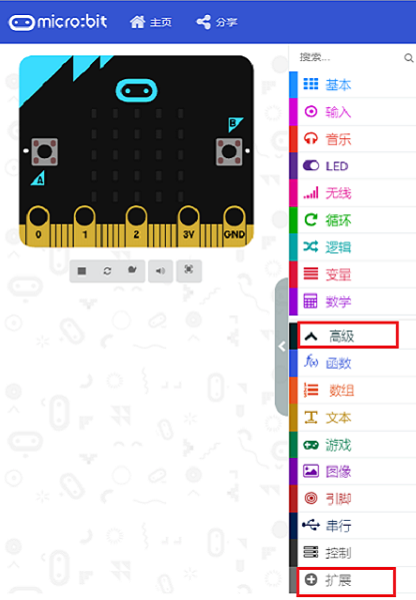
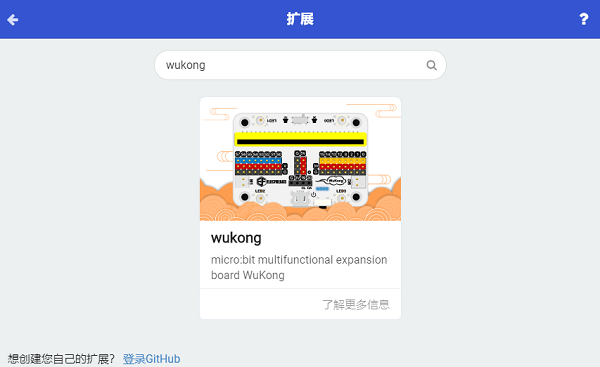
For programming the Wonder Rugged Kit, we need to add a package. Click “Extensions” at the bottom of the drawer and then search “Wukong” in the dialogue box to download it.
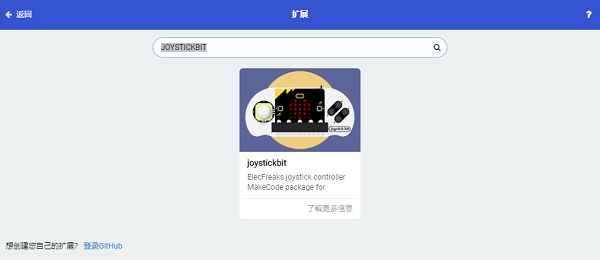
For programming the Joystick:bit, we need to add a package. Click “Extensions” at the bottom of the drawer and then search “joystickbit” in the dialogue box to download it.
Note: If you get a warning indicating some packages will be removed because of incompatibility issues, you can follow the prompts or create a new project in the menu.
Step 2#
Below is the code for Wonder Rugged Kit:
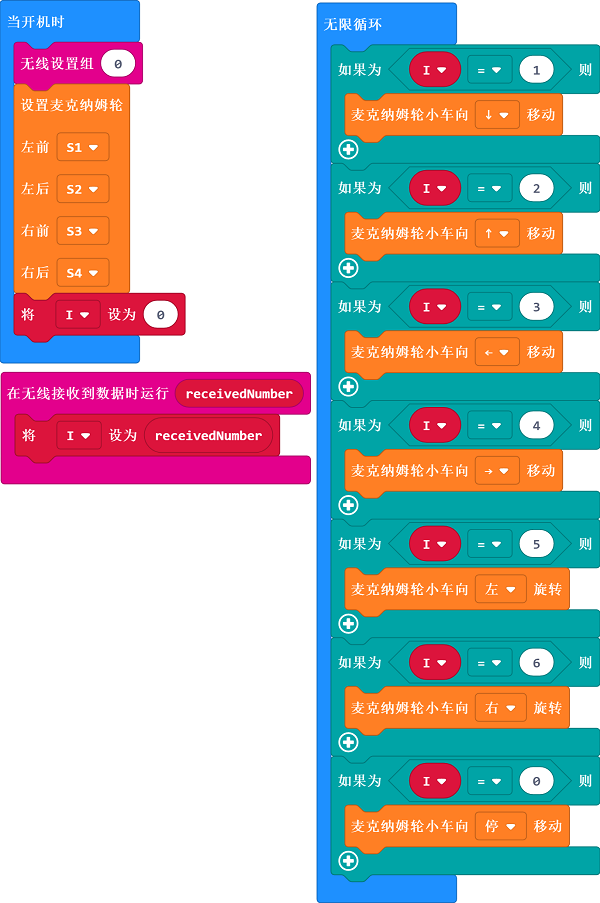
Begin with radio set group and initialize the servos. Save the radio received value in I to control the movement of the car.
Step 3#
Below is the code for Joystick:bit:

Begin with the radio set group and send number through the status of the joystick handle and the buttons.
Program#
Links for Wonder Rugged Kit: https://makecode.microbit.org/_MC9gcKYXpJxW
You can also download it directly below:
Links for Joystick:bit: https://makecode.microbit.org/_e5dHb6c9xbt8
You can also download it directly below:
Result#
The movement of the car can be controlled via Joystick:bit.