Case 02: Line-following Cars
Contents
4. Case 02: Line-following Cars#
4.1. Purpose#
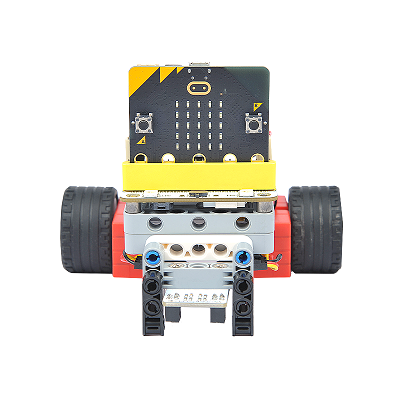
To make a line following car.
4.2. Link#
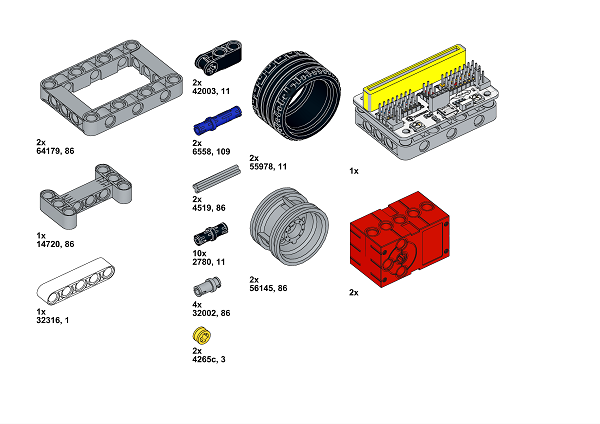
4.3. Materials Required#
Video link: https://youtu.be/J2QKDKnTklw
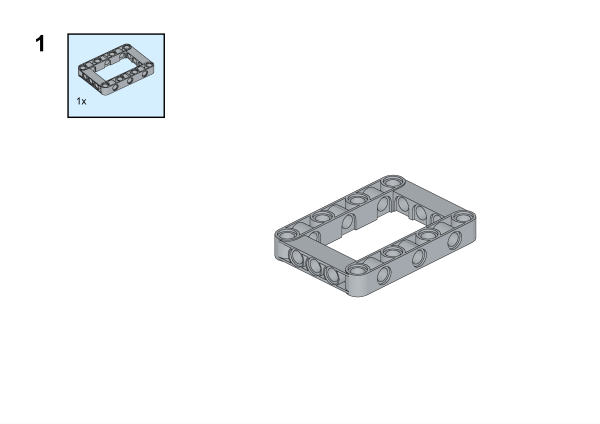
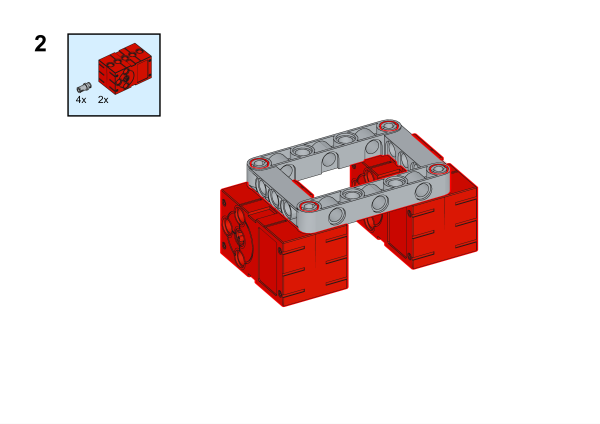
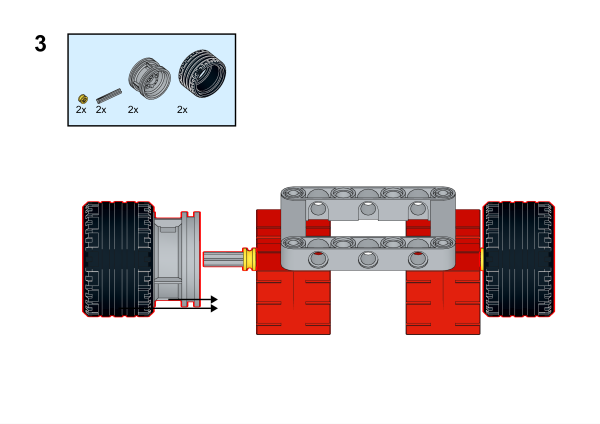
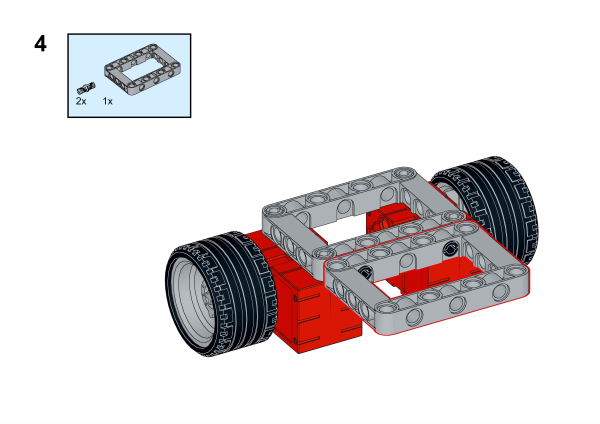
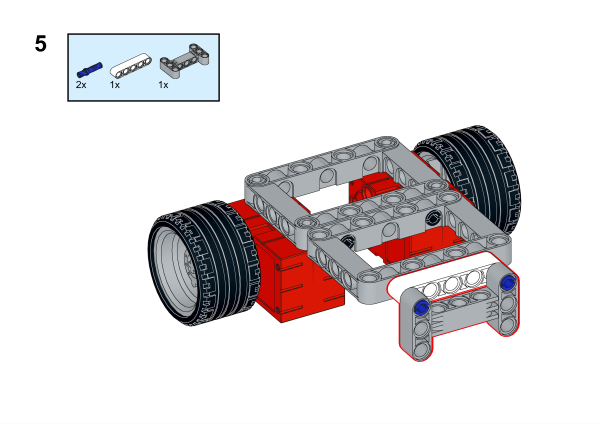
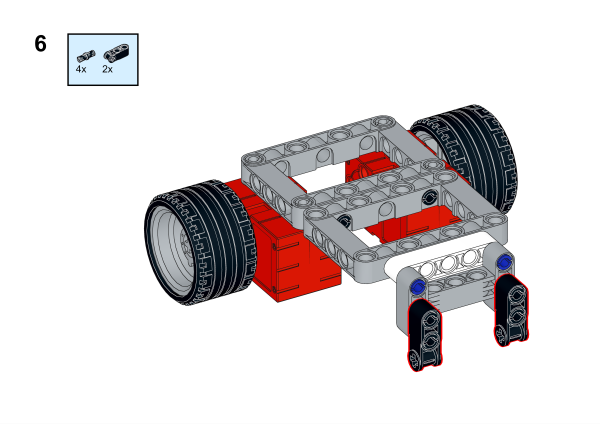
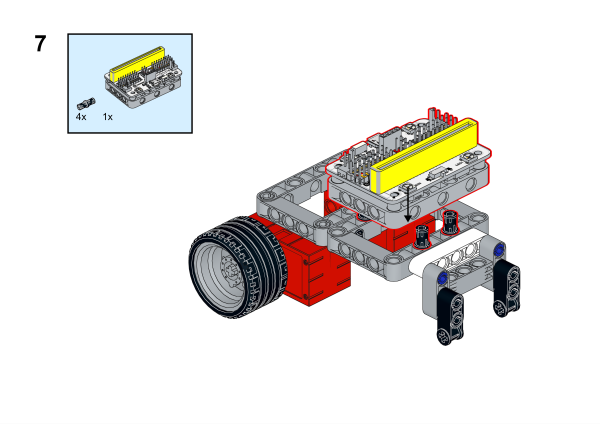
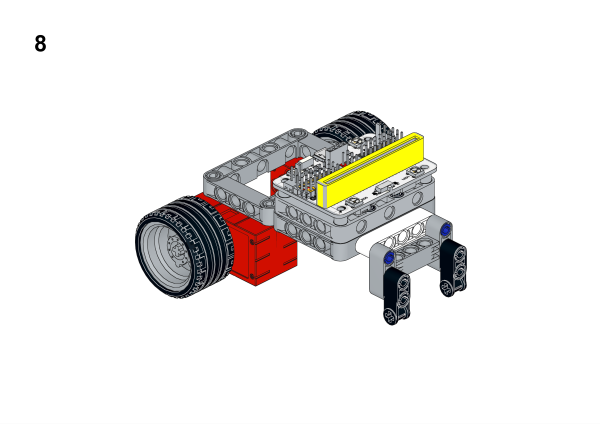
4.4. Bricks build-up#
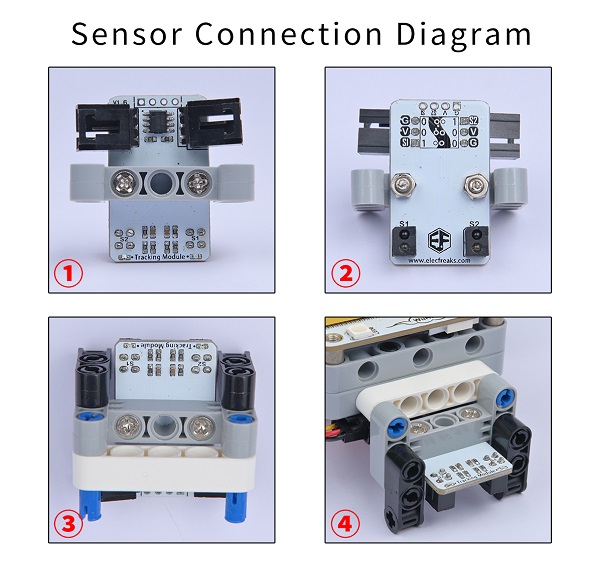
4.5. Installation Mthods of Hardwares#
Install the dual-line tracking sensor with the bricks.
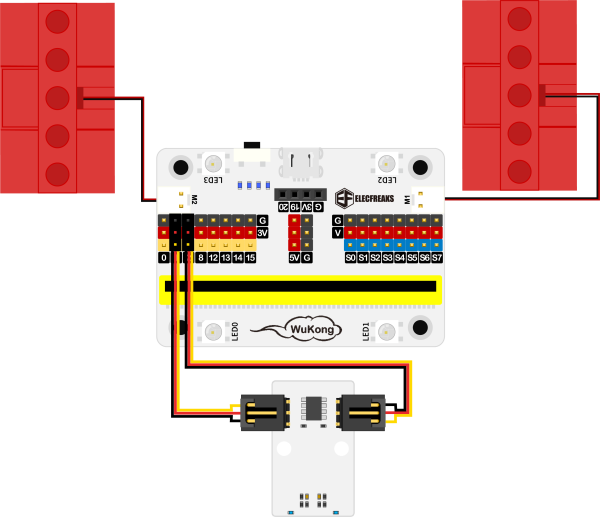
4.6. Hardware Connection#
Connect two motors to M1 and M2, the dual line-following sensor to P1 and P2 ports on Wukong breakout board.
4.7. Software Platform#
4.8. Coding#
Add extensions#
Click “Advanced” in the MakeCode to see more choices.
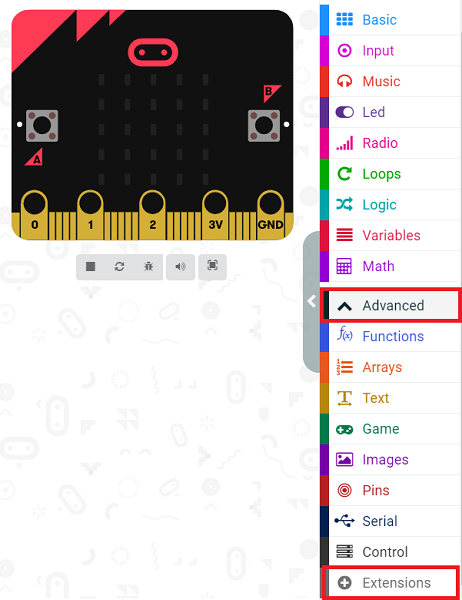
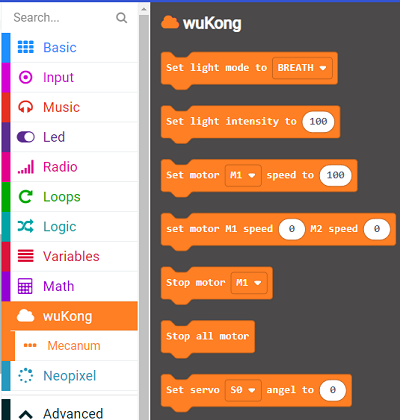
Search with Wukong in the dialogue box to download it.
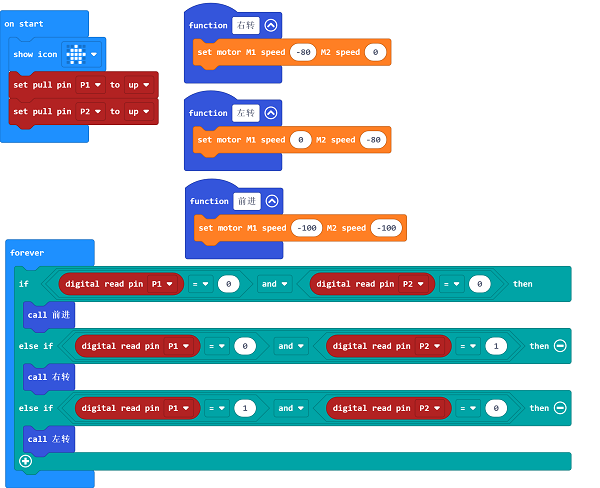
Program#
Result#
The car moves along with the maps at a uniform speed, it will keep its speed and directions if it deviates from the black line until it goes back.