案例01:行驶控制
Contents
3. 案例01:行驶控制#
3.1. 目的#
用不同的方法控制天蓬智能车行驶。
3.2. 使用材料#

3.3. 软件#
3.4. 编程#
在MakeCode的代码抽屉中点击
高级,查看更多代码选项。
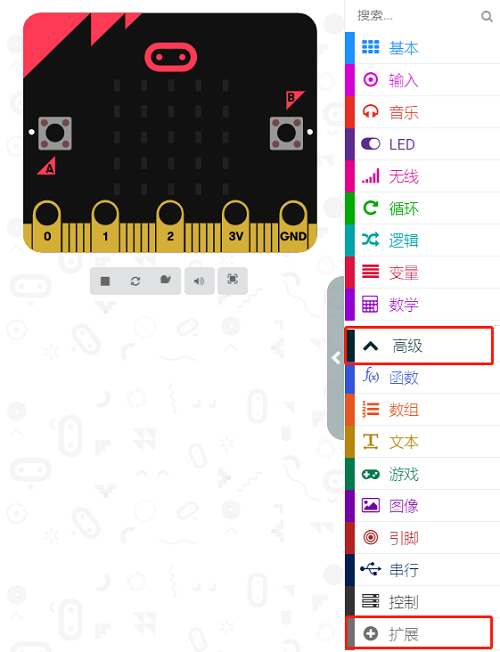
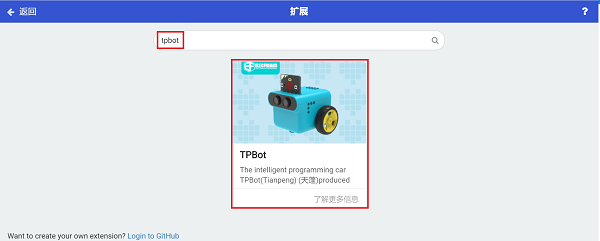
为了给天蓬智能车编程,我们需要添加一个扩展库。在代码抽屉底部找到
扩展,并点击它。这时会弹出一个对话框,搜索tpbot,然后点击下载这个代码库。
##示例程序一
在天蓬模块中拖出一个设置左右轮速度的积木块放入
当开机时积木块中,并将参数都设置为100。

程序#
你也可以通过以下网页直接下载程序。
3.5. 结论#
天蓬智能车会一直向前行驶
##示例程序二
在天蓬模块中拖出一个
向前进速度为100%持续0秒的积木块放入当开机时积木块中,并将参数都设置为速度100、持续3秒。

程序#
你也可以通过以下网页直接下载程序。
3.6. 结论#
天蓬智能车全速前进三秒后停车
##示例程序三
在天蓬模块中拖出一个
向前进速度为100%的积木块放入当按钮A被按下时中,然后设置暂停2000ms,然后在天蓬模块中拖出立刻停车放入当按钮A被按下时中。

程序#
你也可以通过以下网页直接下载程序。
3.7. 结论#
当按钮A被按下后,天蓬智能车全速前进两秒后停车