案例04-听声辩位
Contents
7. 案例04-听声辩位#
7.1. 目的#
让 XGO 实现根据周围声音大小来做出趴下或者匍匐前进的动作。
7.2. 使用材料#
1 × micro:bit XGO Robot Kit 套件
注意:本案例适用于micro:bit(V2.0)
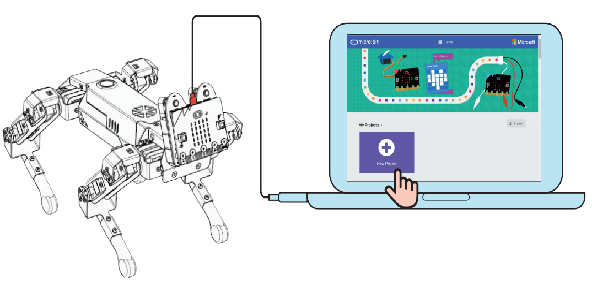
7.3. 硬件连接#
使用数据线将电脑与micro:bit 相连。
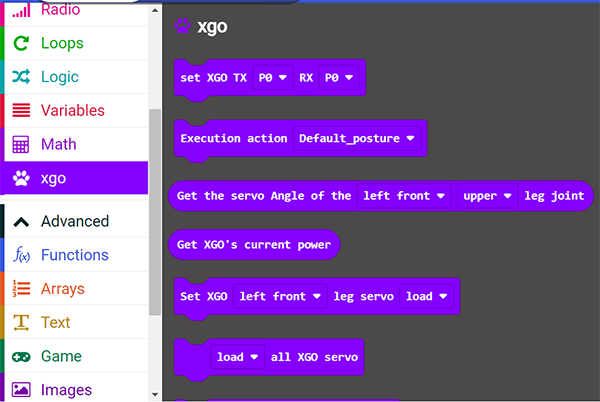
7.4. 软件平台#
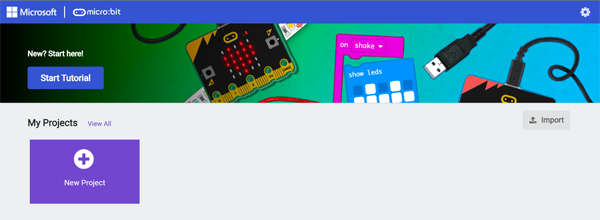
7.5. 编程#
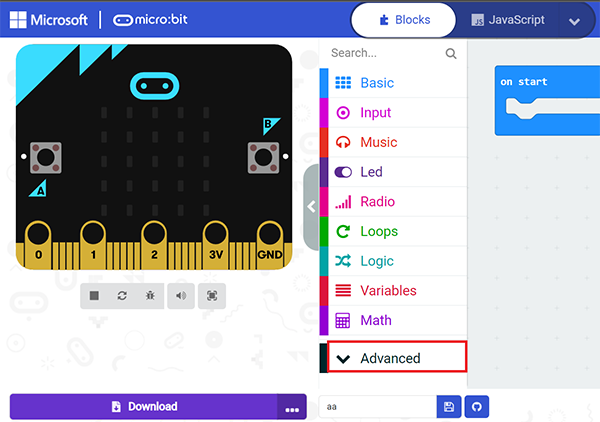
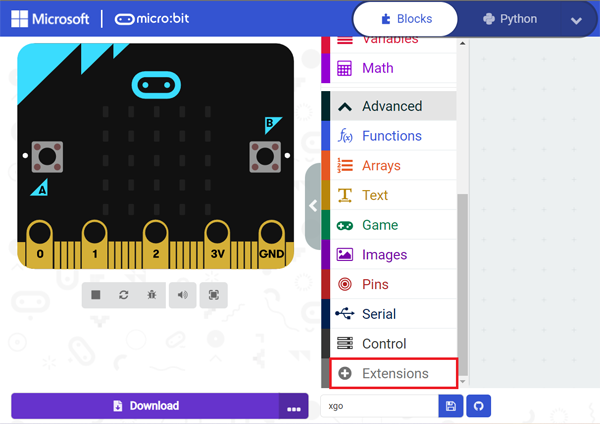
将 XGO 的扩展库添加到 makecode 中。
7.6. 程序#
示例程序#
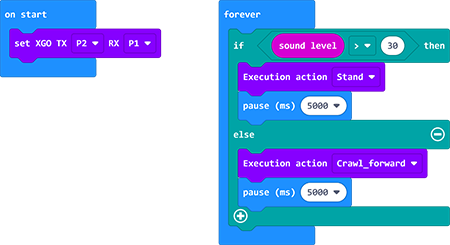
请参考程序链接:Aural Debate
同时,可以直接下载下方程序;
7.7. 相关问题#
如果 XGO 没有行走,可以适当提高声音大小。
7.8. 思考#
能否让 XGO 根据声音大小做出更多的动作?