micro:bit
电子积木传感器
micro:bit 扩展板
Arduino 3合1主控盒
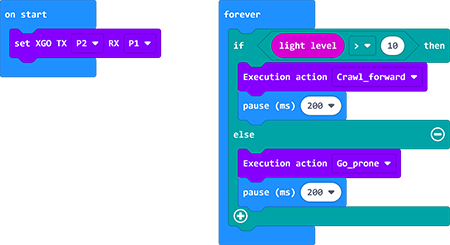
让 XGO 实现根据光线照在micro:bit上的强弱而前进或者趴下。
1 × micro:bit XGO Robot Kit 套件
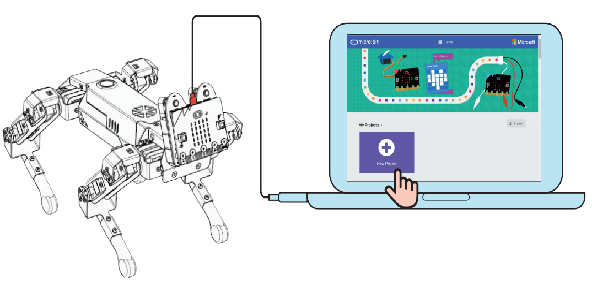
使用数据线将电脑与micro:bit 相连。
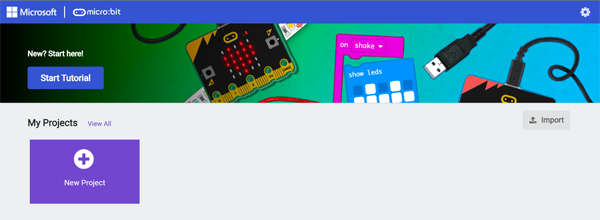
Makecode
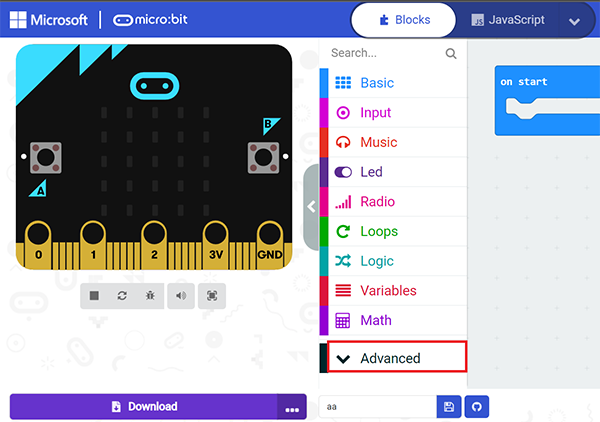
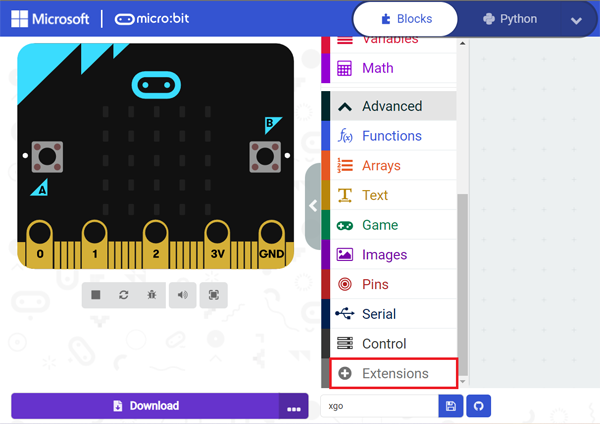
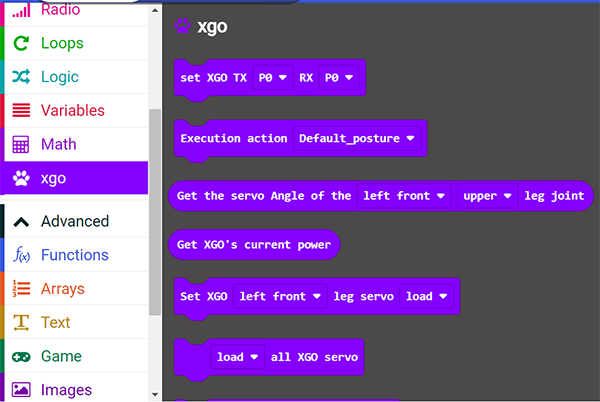
将 XGO 的扩展库添加到 makecode 中。
请参考程序链接:Chasing Dog
同时,可以直接下载下方程序;
如果 XGO 没有行走,可以适当调整光源亮度
能否让 XGO 根据光照强度做出更多的动作?