12. Case 04 -A Sound-controlled Dog
12.1. Purpose
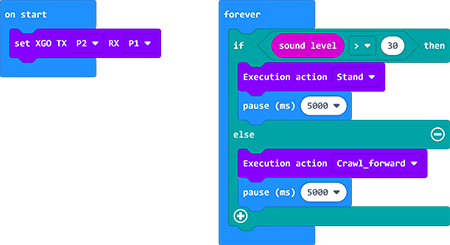
Program to control the movement of XGO through the sound level.
12.2. Materials Required
1 × micro:bit XGO Robot Kit
Note: A micro:bit V2.0 and above is required in this project.
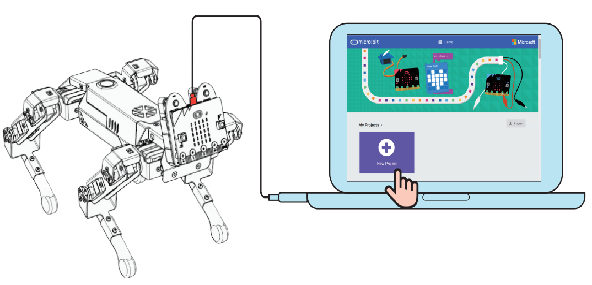
12.3. Hardware Connections
Connect the micro:bit with the computer.
12.4. Software Platform
12.5. Program
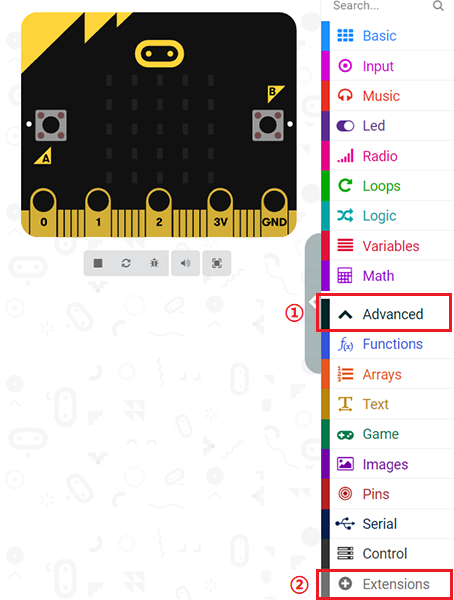
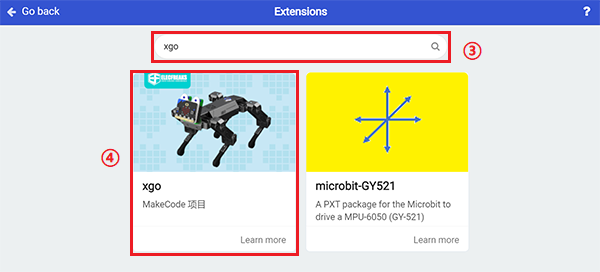
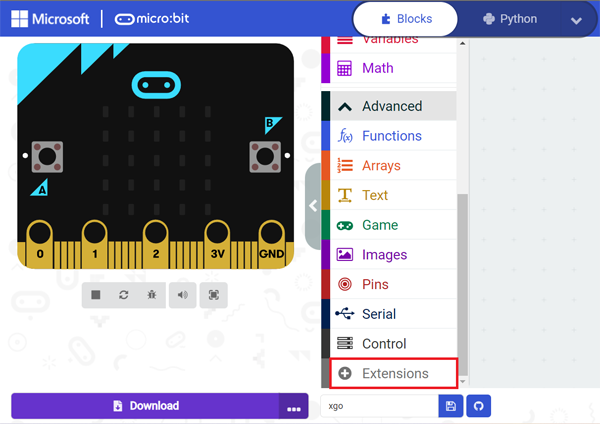
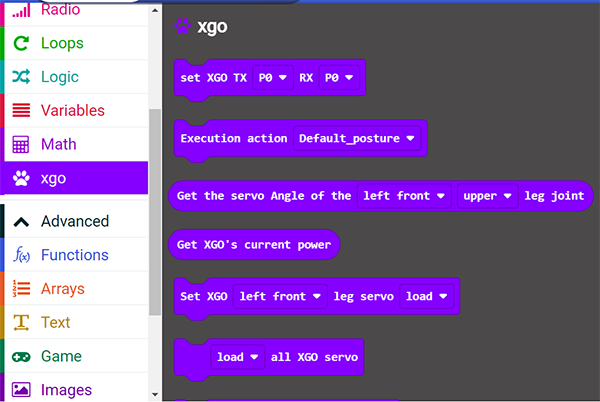
Add the XGO extensions.
12.6. Program
Code
Link: A Sound-controlled Dog
You can also download it directly below:
12.7. FAQ
If XGO doesn’t move, please try increasing the sound level.
12.8. Exploration
How to give more commands to XGO with different sound level ?