Case 06: Automatic Obstacle Avoidance
Contents
9. Case 06: Automatic Obstacle Avoidance#
9.1. Purpose#
Build a Wonder Rugged Kit that can avoid obstacles.
9.2. Products Link#
9.3. Background Knowledge#
9.4. Software#
9.5. Program#
Step 1#
Click “Advanced” in the drawer of MakeCode to see more choices.
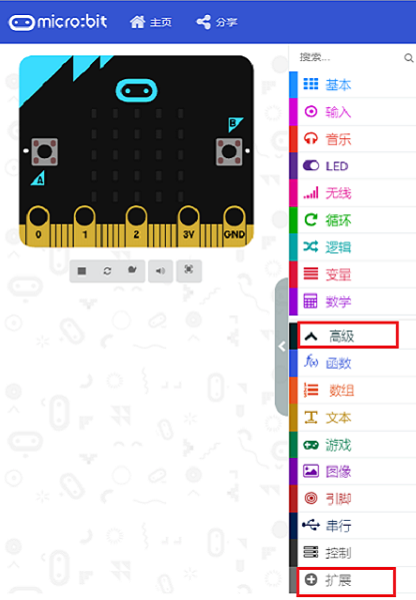
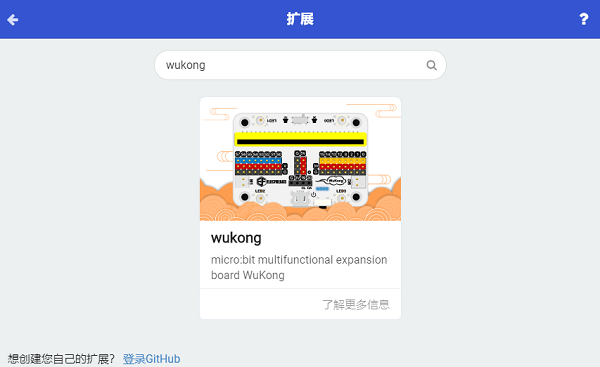
For programming the Wonder Rugged Kit, we need to add a package. Click “Extensions” at the bottom of the drawer and then search “Wukong” in the dialogue box to download it.
For programming the ultrasonic sound sensor, we need to add a package. Click “Extensions” at the bottom of the drawer and then search “github.com/elecfreaks/pxt-sonarbit” in the dialogue box to download it.

Note: If you get a warning indicating some packages will be removed because of incompatibility issues, you can follow the prompts or create a new project in the menu.
Step 2#
Click Wukong to choose mecanum block.

Step 3#
Drag mecanum into on start block and set the connection for servos accordingly.

Step 4#
Set the car to move forward and judge the distance between the obstacle and the car, if the distance is below 25cm, the car goes back with 500ms and turns left with 500ms.
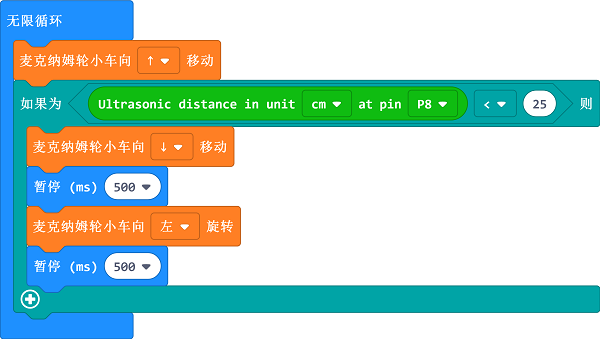
Program#
Links: https://makecode.microbit.org/_HD5CK8LmPWhH
You can also download it directly:
Result#
The car moves forward after starting, if detecting any obstacles, it goes back and turns left to avoid the obstacle and then keeps going.