case 08 servo
Contents
11. case 08 servo#
11.1. Introduction#
The servo is a kind of angle servo driver. It is adapted to varying control system. In this case, we are going to use the micro:bit to control rotating of the servo.
11.2. Products Link#
11.3. Hardware Connect#
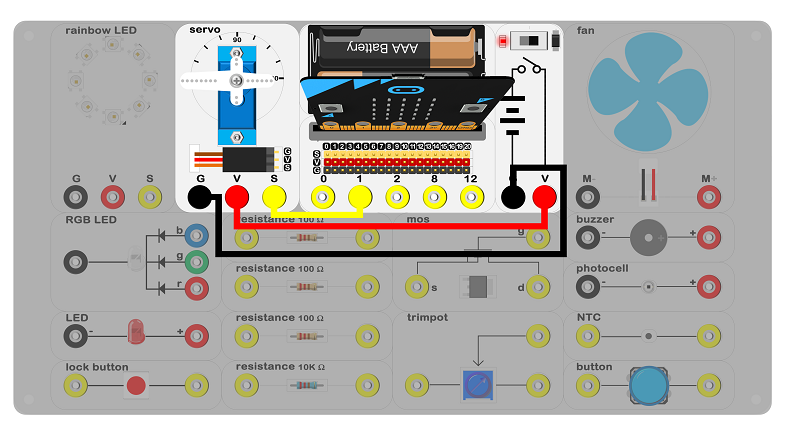
Connect circuit as above picture and put 2 AAA batteries into batteries pack.
11.4. Principles of Circuits#
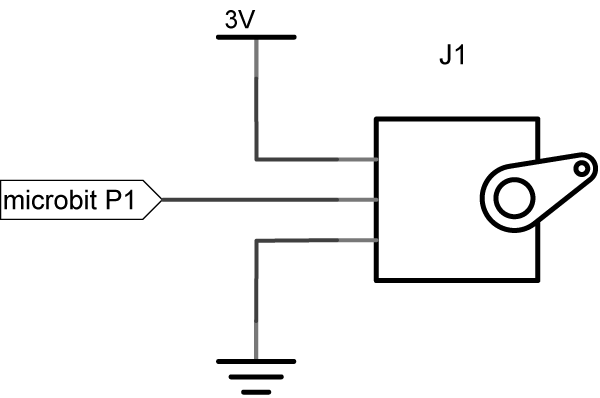
The GND of slot on micro:bit is into innards of batteries’ GND to generate the current loop.
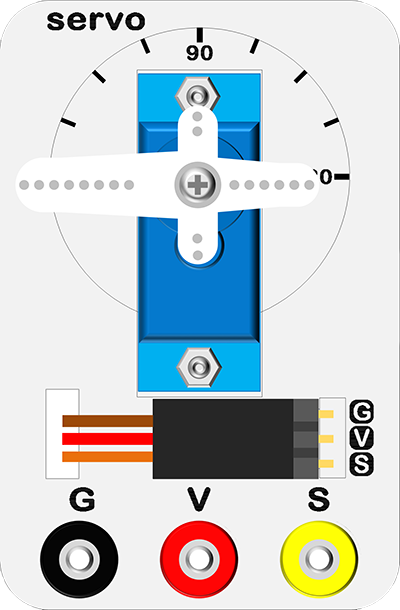
11.5. Introduction of Components#
Servo#
A servo is an automatic control system that consists of a DC motor, a reduction gear unit, a potentiometer and a control circuit. Generally, the servo has its the largest rotation angle (For example:180 deg).
Our reference point at a 90deg middle position is defined by a signal frequency of 20ms and a pulse width of 1.5ms.
The experiment box included a 180° servo.
Note: You don’t need to think out some complex questions like pulse width because micro:bit Foundation has converted the servo code to block.
Note: Please note the positive and the negative when you are connecting.
11.6. Software#
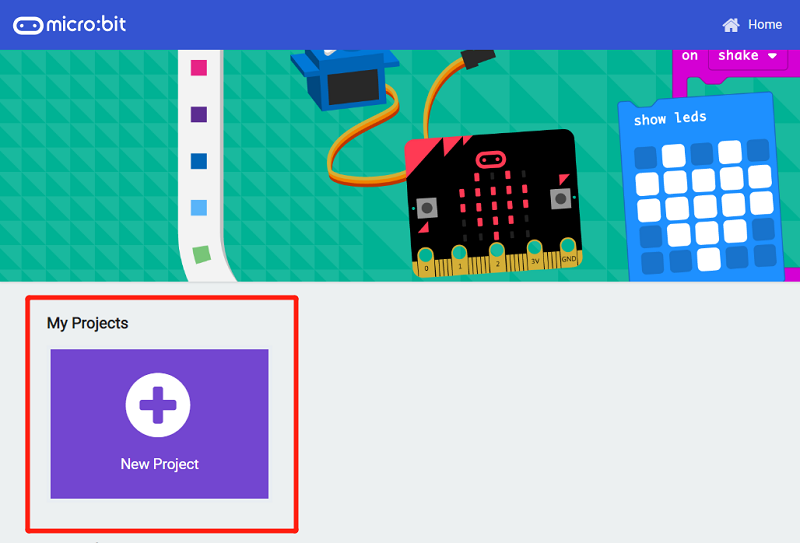
Step 1#
Click makecode https://makecode.microbit.org/#。
Click on “New Project” and set a new Project.
Step 2#
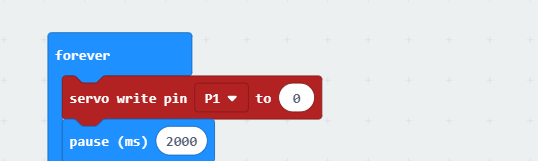
Snap the servo write pin and pause block into the forever and set P1 to 0. Pause 2000ms.
Snap the servo write pin again after the first pause block and set P1 to 180. Pause 2000ms.

Program#
Program link:https://makecode.microbit.org/_fudJaMCRhE1r
You also could directly download program by visiting website as below:
11.7. Result#
The servo will rotate between 0 deg to 180 deg.
11.8. Think#
If we want to make a thermometer dial by using the NTC and the servo, how do we design the circuit and the programming?