Case 03: Line Tracking
Contents
6. Case 03: Line Tracking#
6.1. Purpose#
Programme to set the TPBot driving along with the black line.
6.2. Material#
1 x TPBot

6.3. Software#
6.4. Programming#
Click “Advanced” to see more choices in the MakeCode drawer.
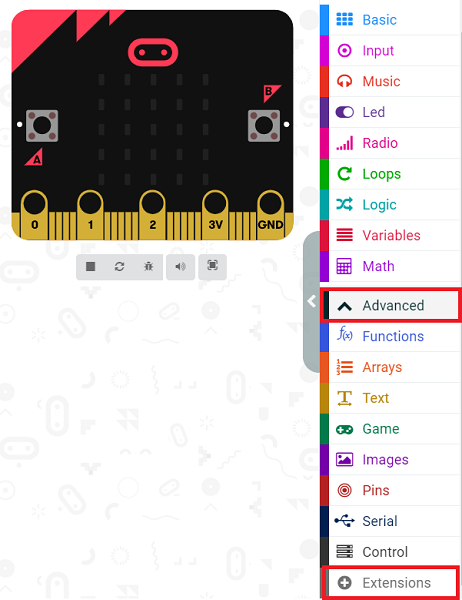
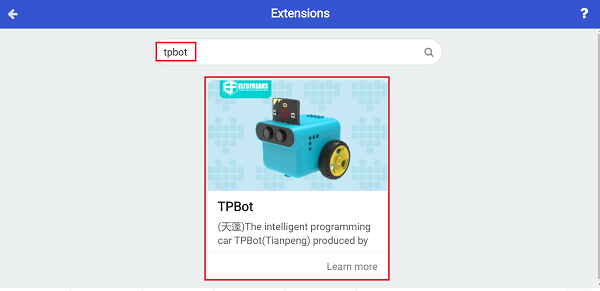
We need to add a package for programming. Click “Extensions” in the bottom of the drawer and search with “tpbot” in the dialogue box to download it.
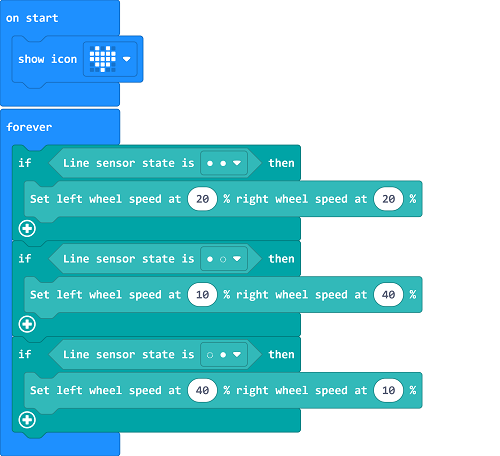
Sample#
Judge the status of the line-tracking sensors: if the black was detected on the left, set the speed of the left wheel in 0 and the right in 40; if the black was detected on the right, set the speed of the left wheel in 40 and the right in 0.
Link#
You may also download it directly below:
Conclusion#
TPBot drives along with the balck line.
6.5. Exploration#
6.6. FAQ#
Q: The car does not work with the code in the wiki.
A: It should be the batteries that are lack of power, please try to fix it by adding the value of the speed in the code.