Case 10: Motor
Contents
12. Case 10: Motor#
12.1. Introduction#
A motor is a device that converts electrical energy into kinetic energy according to the laws of electromagnetic induction. In this lesson we will use a switch to control the start and stop of a motor.
12.2. Components List#
Hardware#
1 × Pico:ed
1 × USB Cable
1 × Breadboard Adapter
1 × 83×55mm Breadboard
1× Mini Motor
1x NPN Transistor
1x Diode
1× 100Ω Resistor
2x Alligator Cables
1x Self lock switch
N* Dupont Cables
12.3. Main Components#
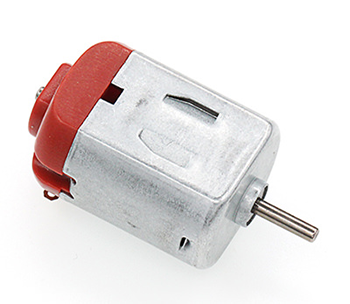
Motor#
A motor is a device that converts electrical energy into kinetic energy according to the laws of electromagnetic induction. There are many different types of motors, in this case we are using a DC motor. When a DC voltage is applied to both ends of the motor, the motor rotates, and the higher the voltage is, the faster it rotates.
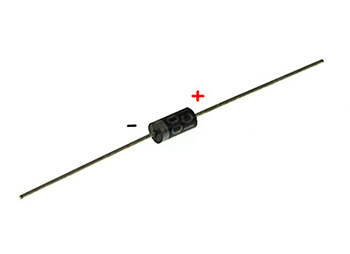
Diode#
A diode is an element with two electrodes, an anode at one end and a cathode at the other, which only allows current to move from the anode to the cathode, think of it as an electronic version of a non-return valve. For a normal diode, the positive and negative electrodes can be distinguished by the colour of the surface of the tube, the end with the white line being the negative electrode.
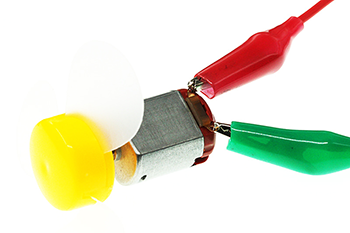
Alligator Cable#
Alligator clip cables serve the same purpose as jump wires. Some devices are not easy to connect with jump wires, thus we consider using alligator clips to connect.

For this project, we are using alligator clips to connect our motors.
12.4. Steps#
Hardware Connection#
Connect the components as the pictures suggest:
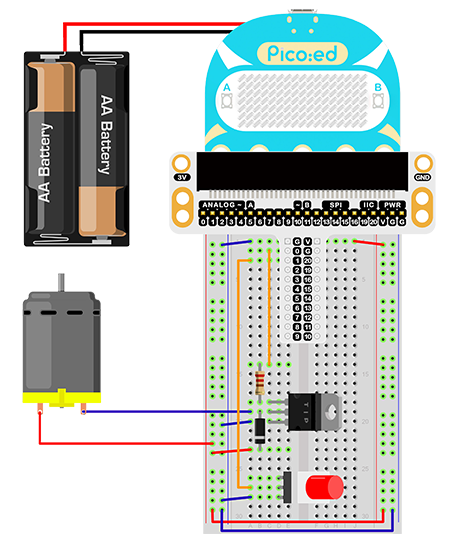
The driving current of the IO port of the Pico:ed is very weak and not enough to drive the motor directly. The circuit diagram for amplifying the IO signal current with a transistor is very similar to the circuit diagram for driving the buzzer in the previous lesson, the only difference is the addition of a diode at both ends of the motor. This diode is called a continuity diode in this circuit. The motor has coils inside it, and as the coils pass through the current, they generate an induced electromotive force at both ends. When the current disappears, the induced electromotive force generates a reverse voltage to the components in the circuit, which may damage the device. The continuity diode is connected in reverse parallel to both ends of the coil in the circuit, so that when the inductive coil is disconnected the electromotive force at both ends does not disappear immediately, and the residual electromotive force is then released through the diode. This is a classic protection design. The schematic diagram is as follows:
This is the picture after finishing the connections:
12.5. Programming#
Program Preparation: Prpgramming environment
Sample Code:#
# Import the modules that we need:
import board
import digitalio
# Set pins and directions of the motor and the self-lock button
motor = digitalio.DigitalInOut(board.P0_A0)
locking = digitalio.DigitalInOut(board.P1_A1)
motor.direction = digitalio.Direction.OUTPUT
locking.direction = digitalio.Direction.INPUT
# Pull up the self lock button
locking.pull = digitalio.Pull.UP
# While true, judge the status of the self-lock button to control the motors
while True:
if locking.value == False:
motor.value = True
else:
motor.value = False
Details of the Code:#
Import the modules that we need.
boardis the common container, and you can connect the pins you’d like to use through it. Thedigitaliomodule contains classes to provide access to basic digital IO
import board
import digitalio
Set pins and directions of the motor and the self-lock button, initialize the motor as True and pull up the button
motor = digitalio.DigitalInOut(board.P0_A0)
locking = digitalio.DigitalInOut(board.P1_A1)
motor.direction = digitalio.Direction.OUTPUT
locking.direction = digitalio.Direction.INPUT
If the pins you are using are not P0_A0 and P1_A1, the other pin numbers can be viewed by entering the following code in the shell window below the Thonny editor.
>>> import board
>>> help(board)
object <module 'board'> is of type module
__name__ -- board
board_id -- elecfreaks_picoed
BUZZER_GP0 -- board.BUZZER_GP0
I2C0_SDA -- board.BUZZER_GP0
I2C0_SCL -- board.I2C0_SCL
BUZZER -- board.BUZZER
BUZZER_GP3 -- board.BUZZER
P4 -- board.P4
P5 -- board.P5
P6 -- board.P6
P7 -- board.P7
P8 -- board.P8
P9 -- board.P9
P10 -- board.P10
P11 -- board.P11
P12 -- board.P12
P13 -- board.P13
P14 -- board.P14
P15 -- board.P15
P16 -- board.P16
SDA -- board.SDA
P20 -- board.SDA
SCL -- board.SCL
P19 -- board.SCL
BUTTON_A -- board.BUTTON_A
BUTTON_B -- board.BUTTON_B
SMPS_MODE -- board.SMPS_MODE
VBUS_SENSE -- board.VBUS_SENSE
LED -- board.LED
P0_A0 -- board.P0_A0
P0 -- board.P0_A0
A0 -- board.P0_A0
P1_A1 -- board.P1_A1
P1 -- board.P1_A1
A1 -- board.P1_A1
P2_A2 -- board.P2_A2
P2 -- board.P2_A2
A2 -- board.P2_A2
P3_A3 -- board.P3_A3
P3 -- board.P3_A3
A3 -- board.P3_A3
Pull up the self lock button
locking.pull = digitalio.Pull.UP
While true, judge the status of the self-lock button to control the motors
while True:
if locking.value == False:
motor.value = True
else:
motor.value = False
12.6. Result#
Push once to start the motor and push again to stop it.
Note: Pico:ed has a low supply voltage of only 3V, the motor may not start when the button is pressed, in this case, please poke the fan of the motor to make the motor rotate normally.
12.7. Exploration#
How to design the circuit and program if we use the trimpot to control the speed of the motor?