Case 01: Full Speed Ahead
Contents
9. Case 01: Full Speed Ahead#
9.1. Introduction#
Hello, we are going to code to drive the Ring:bit car to do some interesting projects in this lesson, of course we will explain the knowledge from easy to deep, this lesson will implement the Ring:bit car to complete the basic forward and backward actions, let’s start.
9.2. Hardware Connect#
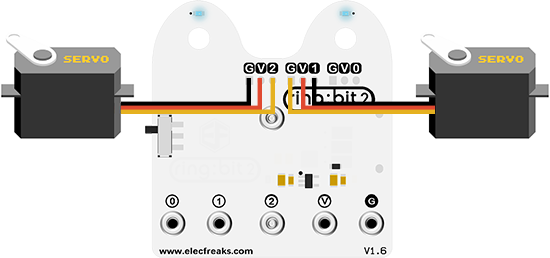
Connect the left wheel servo to P1 of the Ring:bit expansion board and the right wheel servo to P2. You can also exchange the connections as long as you program with the equivlent connections in MakeCode, let’s move on!
9.3. Software Programming#
You should prepare the programming platform ready, if not, please can refer to this essay: Preparation for programming
Sample Projects#
# Import the modules that we need
import board
from ringbit import *
from picoed import *
# Set the pins of the servos
ringbit = Ringbit(board.P1, board.P2)
# While ture, detect if button A/B is pressed to control the movement of the car
while True:
if button_a.is_pressed():
ringbit.set_speed(100, 100)
elif button_b.is_pressed():
ringbit.set_speed(-100, -100)
Details of program:#
Import the modules that we need.
boardis the common container, and you can connect the pins you’d like to use through it;ringbitmodule contains classes and functions for Ring:bit smart car operation andpicoedmodule contains the operation functions to button A/B.import board from ringbit import * from picoed import *
Set the pins of the servos.
ringbit = Ringbit(board.P1, board.P2)
While ture, detect if button A/B is pressed to control the movement of the car.
while True: if button_a.is_pressed(): ringbit.set_speed(100, 100) elif button_b.is_pressed(): ringbit.set_speed(-100, -100)
9.4. Result#
Press button A to drive the car at its full speed;
Press button B to reverse the car.
9.5. Exploration#
How to program to stop the car by pressing both A/B at the same time?