案例10:防坠落小车
Contents
12. 案例10:防坠落小车#
12.1. 目的#
沿着桌面边缘贴一圈黑色胶纸,天蓬智能车检测到黑线时会迅速后退,然后换一个方向继续前进。
12.2. 使用材料#

12.3. 软件#
12.4. 编程#
在MakeCode的代码抽屉中点击
高级,查看更多代码选项。
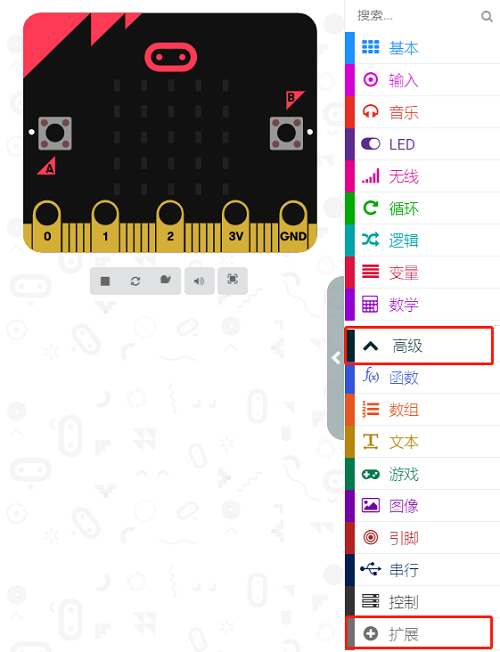
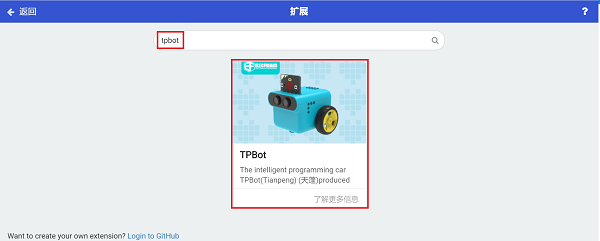
为了给天蓬智能车编程,我们需要添加一个扩展库。在代码抽屉底部找到
扩展,并点击它。这时会弹出一个对话框,搜索tpbot,然后点击下载这个代码库。
##示例程序
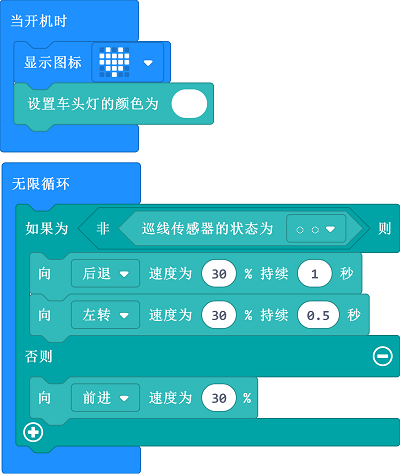
当开机时设置micro:bit的LED矩阵显示爱心图标,天蓬智能车车头灯亮白色灯光。在
无限循环中,判断巡线传感器是否检测都黑线,当巡线传感器都检测到黑线时,小车以30%的速度后退一秒,然后以30%的速度左转0.5秒,如果巡线传感器没有检测到黑线,则小车以30%的速度前进。
程序#
你也可以通过以下网页直接下载程序。
12.5. 结论#
开机时micro:bit的LED矩阵显示爱心图案,天蓬智能车车头灯亮白色灯光,并向前行驶。当行驶到黑线范围时,天蓬智能车后退并左转,然后继续行驶。
12.6. 思考#
12.7. 常见问题#
Q:使用案例中的代码发现小车不能正常运行? A:电池电量不足,增大程序中的小车速度参数的数值,并测试。