robit智能小车介绍
Contents
1. robit智能小车介绍#
1.1. 简介#
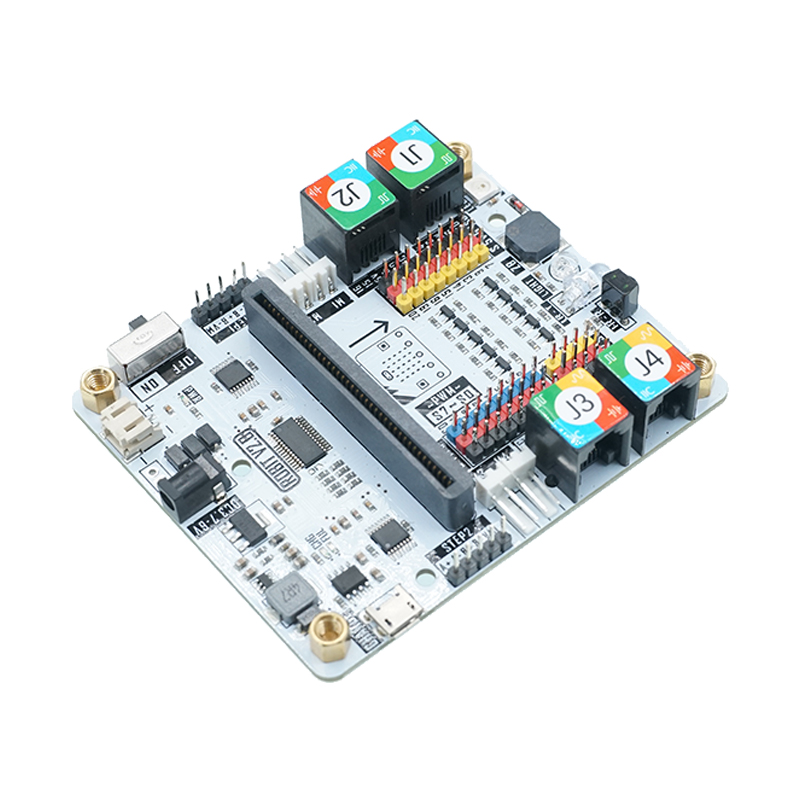
robit smart car是基于micro:bit的一个智能小车,它的核心扩展板是robit。robit除了继承了Mbot上的RJ25接线端口、电机接口之外,还扩展2路直流电机接口、两路步进电机口(步进电机接口与4路直流电机接口复用),8路PWM信号输出接口,可以驱动舵机等PWM信号驱动的设备,板载8路G-5V-S数字信号OCTOPUS电子积木接口,4路G-5V-S模拟信号OCTOPUS电子积木接口。robit smart car可以实现Mbot的所有功能,可以说的上是基于micro:bit的Mbot的升级版。
特点#
支持4路直流电机驱动,2路步进电机驱动。
8路PWM信号输出接口。
板载8路G-5V-S数字信号OCTOPUS电子积木接口。
板载4路G-5V-S模拟信号OCTOPUS电子积木接口。
直流电源供电输入电压:DC 3.7V-6V。
锂电池供电输入电压:DC 3.7-4.2V。
技术参数#
品名:robit智能小车
SKU:EF08195
版本号:V1.0
电机种类:TT马达
驱动轮数目:2
巡线模块:有
超声波:有
电源:锂电池
净重:426g
组装后尺寸:170mm X 128mm X 98mm
1.2. 零件清单#
底盘 x 1
Robit x 1
超声波 x 1
双路寻线模块 x 1
TT马达 x 2
电池 x 1
螺丝包 x 1
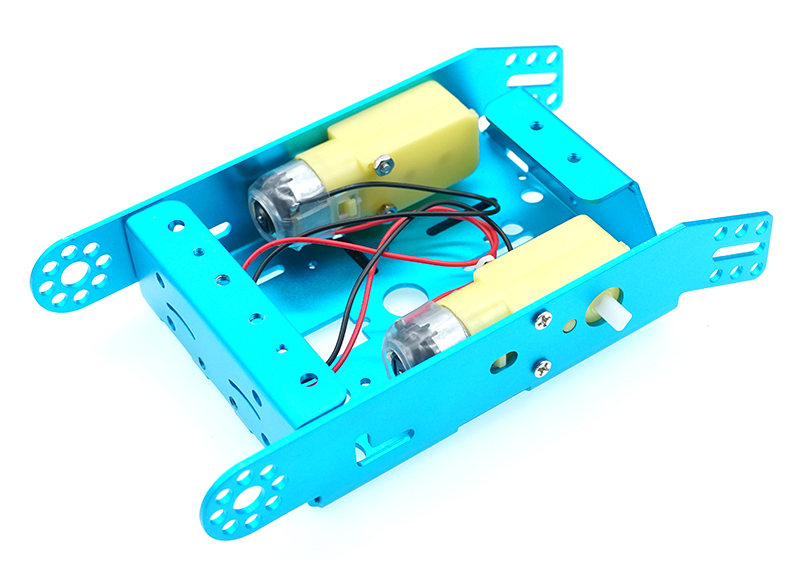
1.3. 底盘安装图纸#
第一步:使用4颗M3*25沉头螺丝安装TT马达#
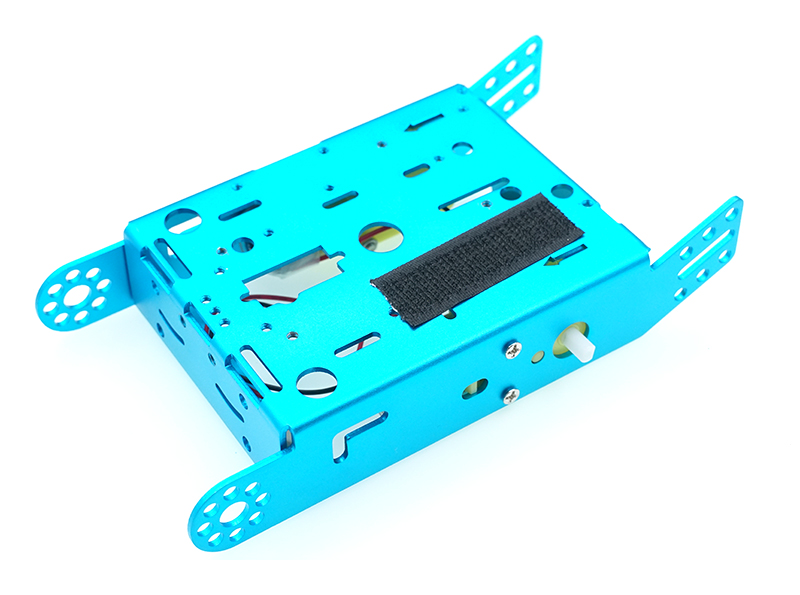
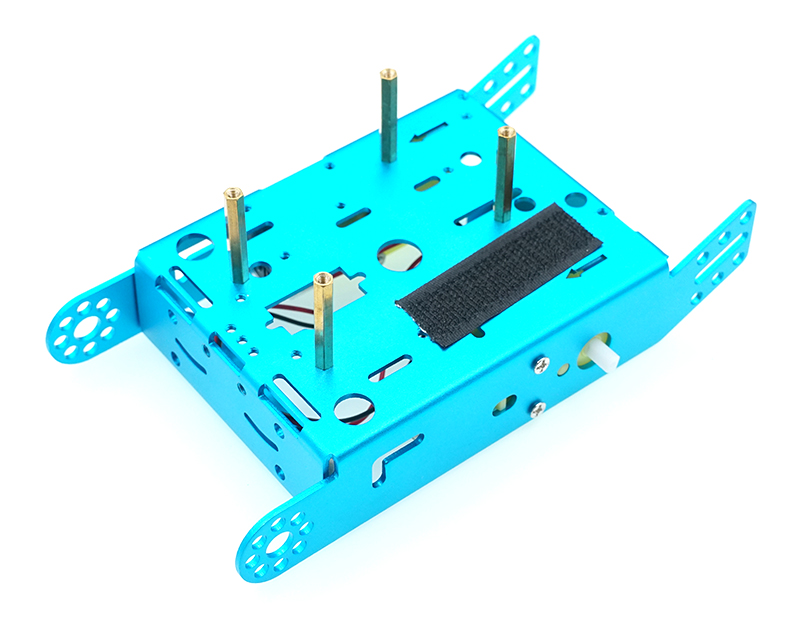
第二步:将魔术贴的勾面粘在车架上#
第三步:将4颗M4*6单通铜柱安装在Robit正面#
第四步:在底盘上紧固四个M3×30单通铜管#
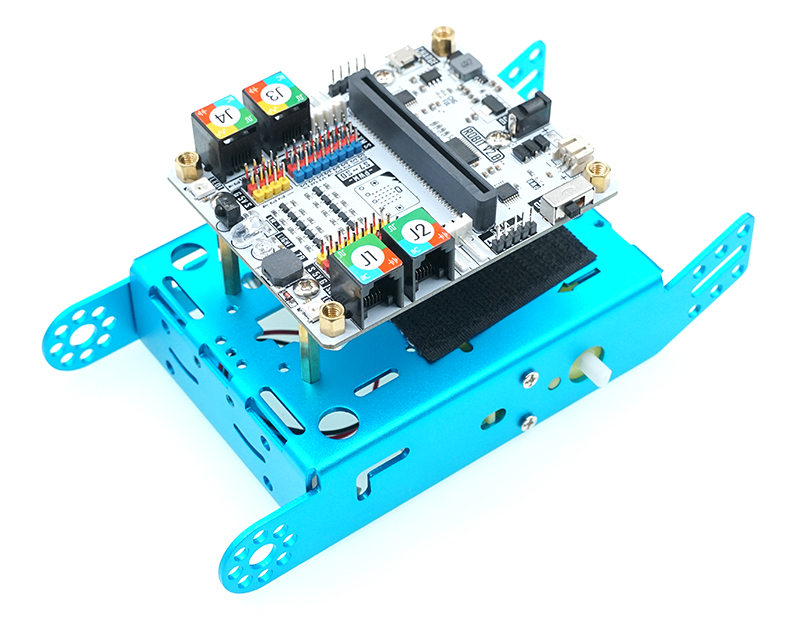
第五步:用四个M3*5螺钉将Robit板固定到底盘上#
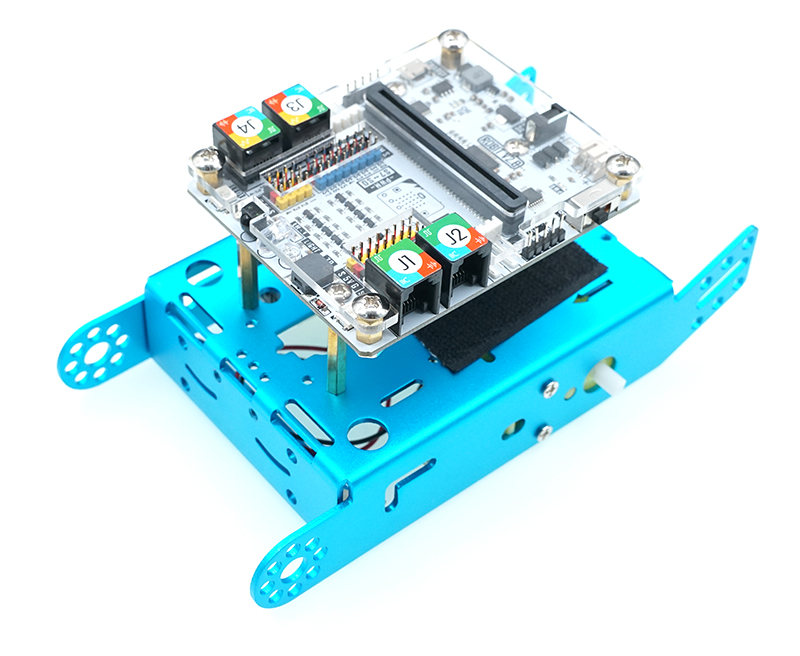
第六步:用M4*5螺钉安装亚克力外板#
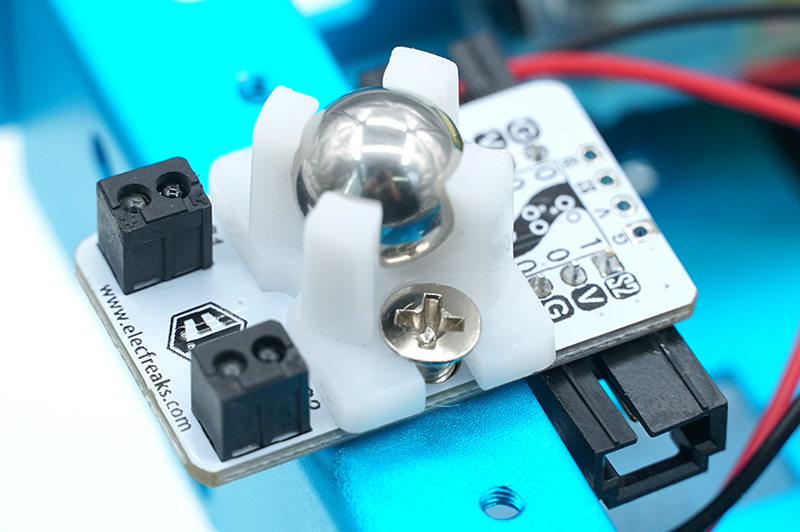
第七步:使用2颗M4*10沉头螺丝安装万向轮和巡线模块#
第八步:安装轮胎#
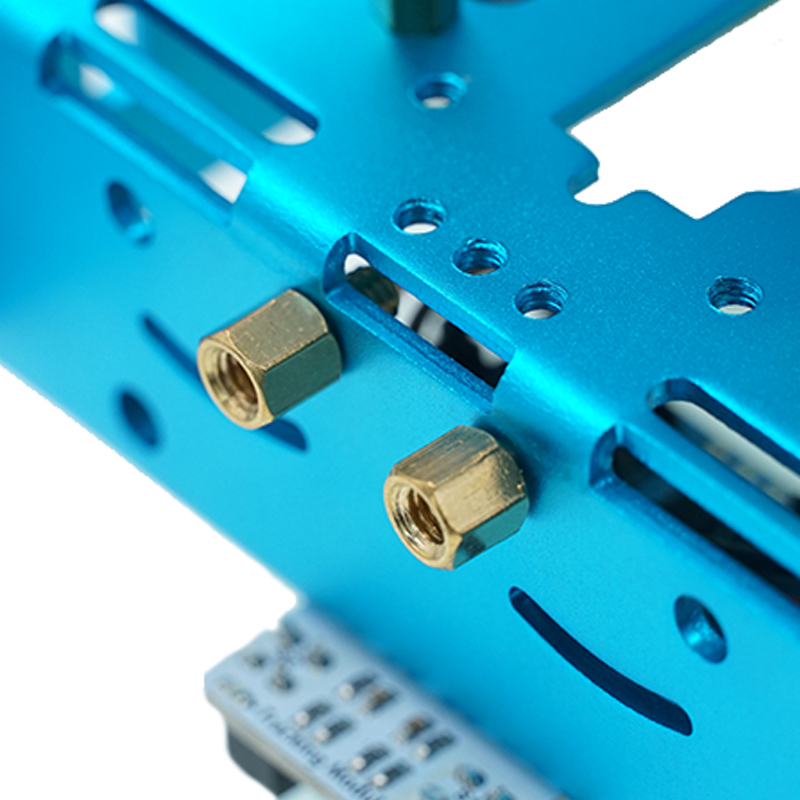
第九步:在车头位置装上2颗M4*6+6单通铜柱#
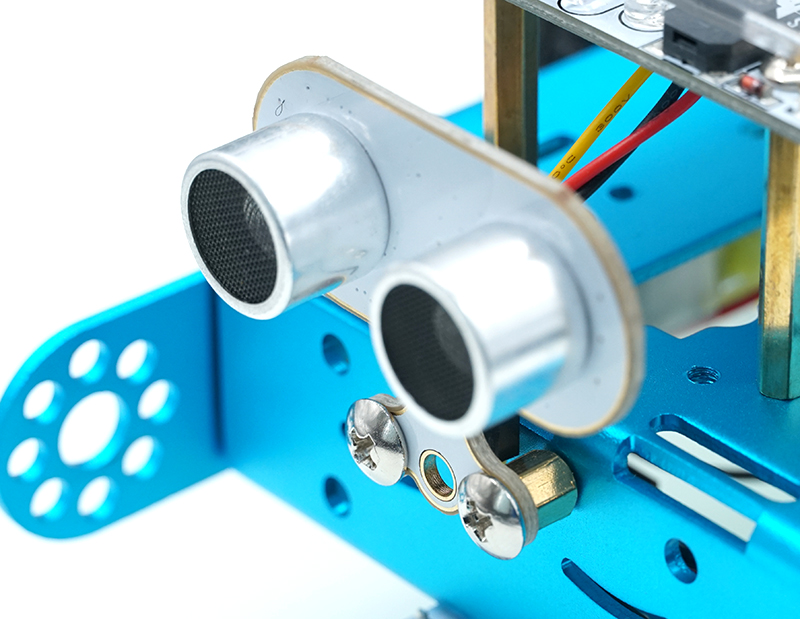
第十步:使用2颗M4*5螺丝安装超声波模块#
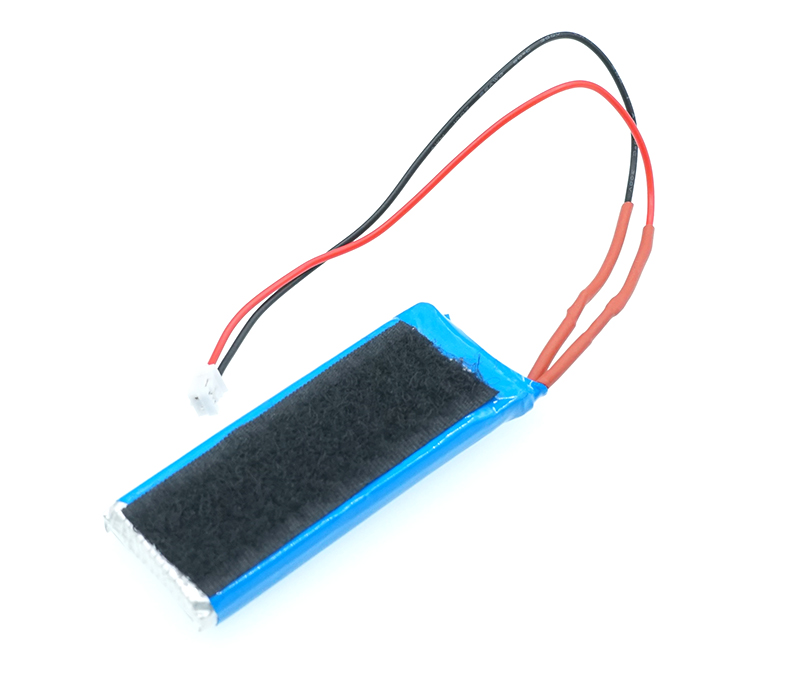
第十一步:将魔术贴的毛面贴在电池上#
第十二步:将电池粘在转接板上,插在主板上#

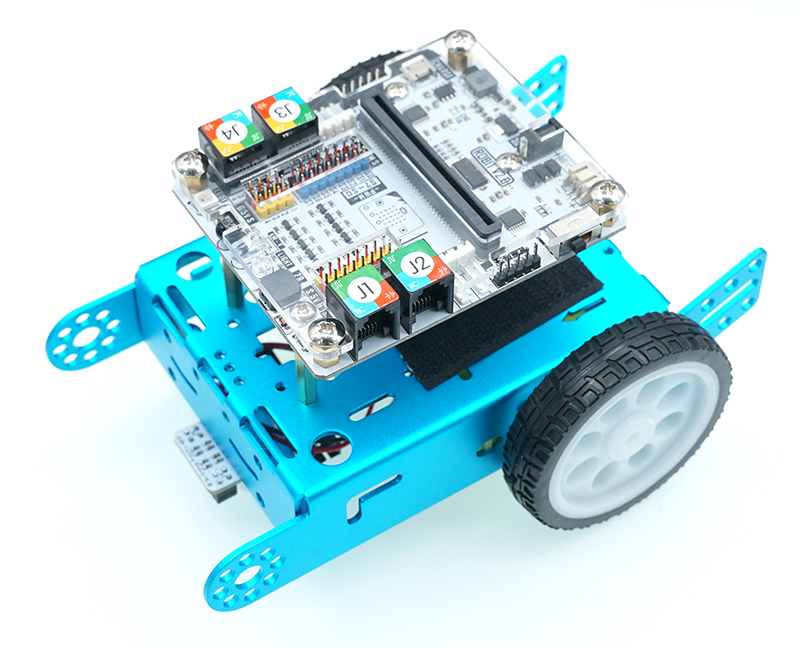
成品示意图#
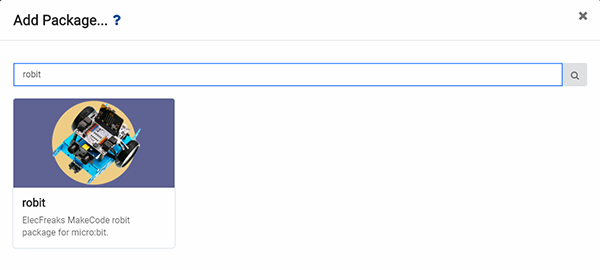
1.4. 示例代码#
点击 “Add Package”,输入 “robit” 点击搜索,添加robit的软件包