天蓬智能车python使用示例
Contents
2. 天蓬智能车python使用示例#
2.1. 添加python文件#
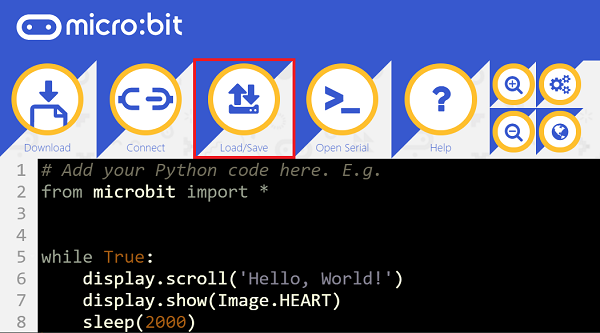
下载压缩包并解压EF_Produce_MicroPython-master 打开Python editor
为了给天蓬智能车编程,我们需要添加TPBot.py这个文件。 点击Load/Save。
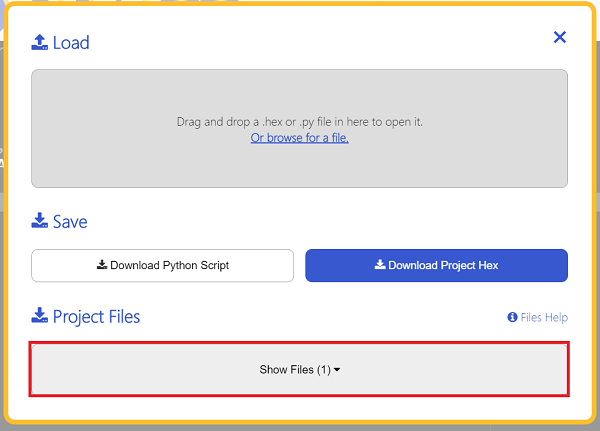
点击Show Files(1)下拉菜单。
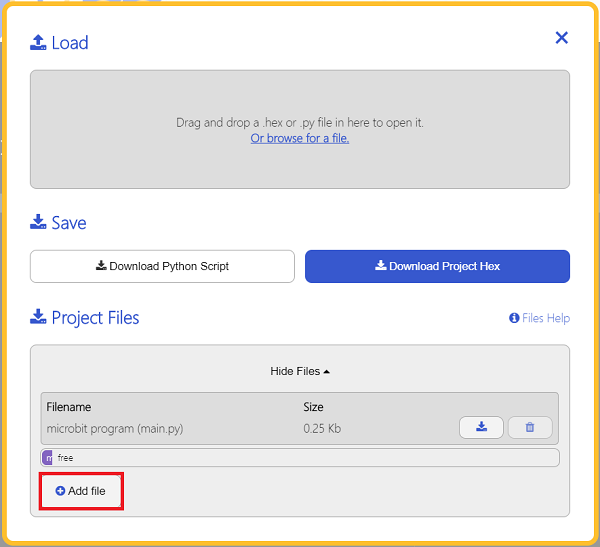
点击Add file在本地找到已经下载并解压完成的EF_Produce_MicroPython-master文件夹。
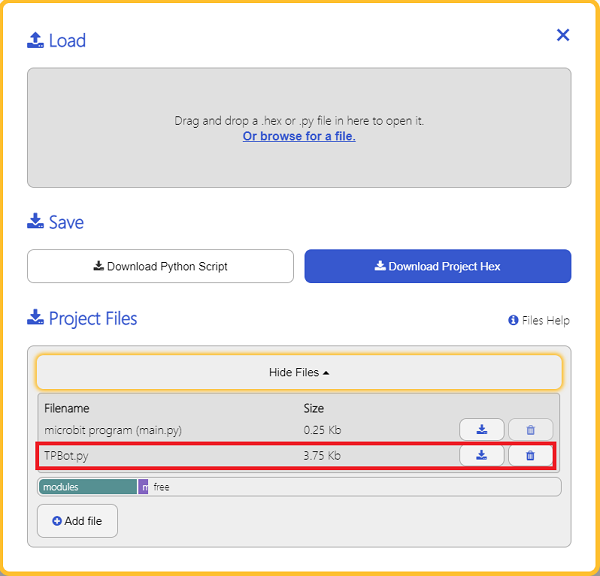
从中选择TPBot.py这个文件添加进来。
2.2. 示例代码#
2.3. 示例一 让小车全速前进#
from microbit import *
from TPBot import *
tp = TPBOT()
tp.set_motors_speed(100,100)
# 设置左右轮电机速度
2.4. 结果#
天蓬智能车左轮速度为100,右轮速度为100,全速前进。
2.5. 示例二 车头LED灯随机变色#
from microbit import *
from TPBot import *
import random
tp = TPBOT()
while True:
R = random.randint(0,255);
G = random.randint(0,255);
B = random.randint(0,255);
tp.set_car_light(R,G,B)
sleep(500)
2.6. 结果#
天蓬智能车的车头LED灯随机变色。
2.7. 示例三 超声波避障小车#
from microbit import *
from TPBot import *
tp = TPBOT()
while True:
i = tp.get_distance(0)
if i>3 and i<30:
tp.set_motors_speed(-50, 50)
sleep(500)
else:
tp.set_motors_speed(50, 50)
2.8. 结果#
天蓬智能车在行驶过程中如果遇到障碍物,则立即转向。
2.9. 示例四 巡线行驶#
from microbit import *
from TPBot import *
tp = TPBOT()
while True:
i = tp.get_tracking()
if i == 10:
tp.set_motors_speed(10, 50)
if i == 1:
tp.set_motors_speed(50, 10)
if i == 11:
tp.set_motors_speed(25, 25)
2.10. 结果#
天蓬智能车巡线行驶。
2.11. 示例五 控制舵机#
from microbit import *
from TPBot import *
tp = TPBOT()
while True:
tp.set_servo(1,180)
sleep(1000)
tp.set_servo(1,0)
sleep(1000)
2.12. 结果#
天蓬智能车S1端口连接的舵机往复转动。