课程_39 编码射击
Contents
39. 课程_39 编码射击#
你有一个小镇可以拯救,还有一条龙可以射击!这是一个展示你创意的大好机会。
39.1. 目标#
1.组装射击机的所有部件
2.编辑micro:bit代码,检测激光打击信号,赢取高分。
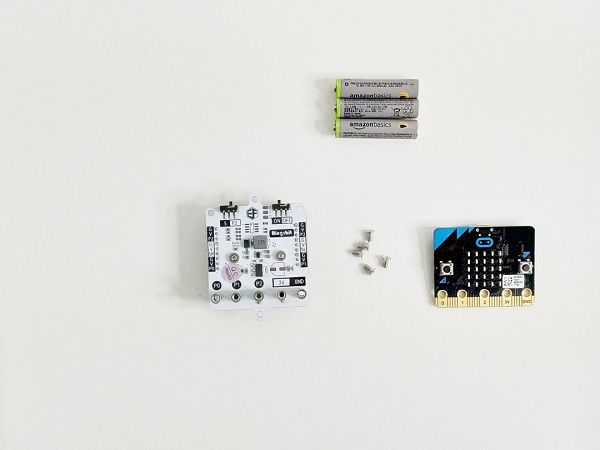
39.2. 物料#
1 x 射击游戏盒子
1 x 光线传感器
1 x 舵机
1 x ring:bit
1 x micro:bit
5 x 螺丝
3 x AAA电池
第一步-整理你的城镇!#
将所有山峦和灌木丛插入您所在城镇的路径。
将舵机安装到弹出中心的孔中。
将舵机电线穿入孔中,然后从前面的盒子中取出。

第2步 - 安装你的micro:bit#
将micro:bit安装在ring:bit并用5个螺钉将其拧紧。
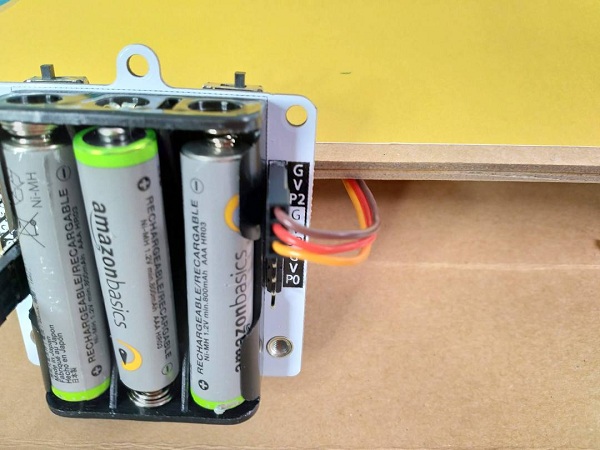
将所有3节电池插入电池组背面。
将左侧开关切换到P2,右侧开关切换到OFF。在我们编写micro:bit之后我们将打开它。
步骤3 - 连接所有器材!!#
1.将舵机连接到ring:bit上的P2口。并确保棕色线到达G,黄色线到达P2。 2.将光敏传感器连接到ring:bit上的P1口。黑线应连接到G.
步骤4 - 编码!#
如果您从未尝试使用micro:bit进行编码,请查看我们的入门教程!
###第5步 - 真正的挑战 - 校准
校准你的龙以确保它在天空中来回飞行而不是反复地面对地面。
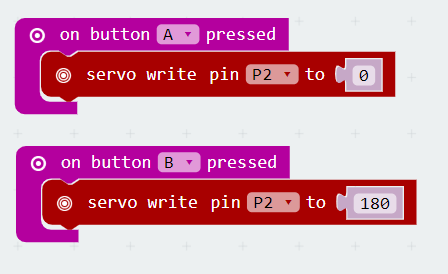
伺服牢固到位 - 按下微动:编码按钮A按下时将伺服转动到0度,按下按钮B时转动180度。
按下按钮A后,将伺服臂放在伺服头上,观察按下按钮B时的位置。如果伺服臂指向太远或向侧面,请调整臂并减小编码角度。(例如调整0 - 180度至20 - 160度)
用相同角度的龙臂更换舵机 并拧紧它。
第6步 - 校准第2部分#
在光传感器上。我们必须捕捉当前的光线水平,当激光经过时,传感器会提醒micro:bit光线强度提高了。
将光传感器穿过弹出窗口下方的孔并穿过盒子的前部。
将光传感器放入龙的嘴中,然后将其放下以固定它。
对micro:bit进行编码,按下按钮时,通过光传感器检测光线水平。

第7步 - 全部放在一起。#
现在我们希望能够在龙被击中时阻止龙并且还能增加得分!
所以我们应该结合两段代码并使用IF逻辑块来检查我们是否被击中。
如果我们被击中,那么我们更改micro:bit上的图标并暂停一段时间,然后再更改回默认图标。
ELSE(如果我们没有检测到并命中)那么我们允许舵机按正常方式移动。
不喜欢自己编写 - 在这里找到整个代码!
此外 - 添加更多的块,以便在龙被击中时增加得分。
完成了!