案例08:沿着黑线行驶
Contents
11. 案例08:沿着黑线行驶#
11.1. 目的#
让你的Cute:bot智能赛车完成寻黑线绕圈跑。
11.2. 使用材料#
1 x Cutebot套件
1 x 巡线地图(自制或使用Cutebot套装内地图)
11.3. 软件平台#
11.4. 编程#
步骤 1#
在MakeCode的代码抽屉中点击高级,查看更多代码选项。

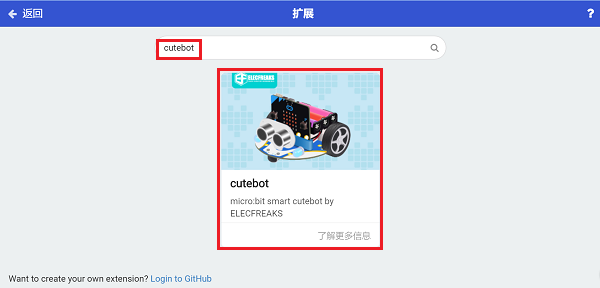
为了给Cutebot套件编程,我们需要添加一个代码库。在代码抽屉底部找到“扩展”,并点击它。这时会弹出一个对话框。搜索
Cutebot,然后点击下载这个代码库。
注意:如果你得到一个提示说一些代码库因为不兼容的原因将被删除,你可以根据提示继续操作,或者在项目菜单栏里面新建一个项目。
步骤 2#
在
当开机时积木块中显示图标,选择一颗心;

步骤 3#
在
无限循环积木块中插入三次if(判断)积木块。首先判断巡线头状态是否为 ○ ● ,即左巡线头未检测到黑线,右巡线头检测到黑线。
将左轮速度设置为
50,右轮速度10,利用速度差完成右转,回归黑线道路。再判断巡线头是否为 ● ○ ,左转回归黑线。
当巡线头为 ● ● ,证明小车在黑线上,以
50的速度直行。

程序#
请参考程序连接:https://makecode.microbit.org/_V53Y9HMygAVp
你也可以通过以下网页直接下载程序。
---11.5. 结论#
小车按照地图黑线匀速前进,偏离黑线会保持速度和方向行驶,直到回归黑线。
11.6. 思考#
如何在Cutebot自带地图外侧的白圈内行驶而不驶出地图。